
DINAMIKA - PowerPoint PPT Presentation
1 / 47
Title: DINAMIKA
1
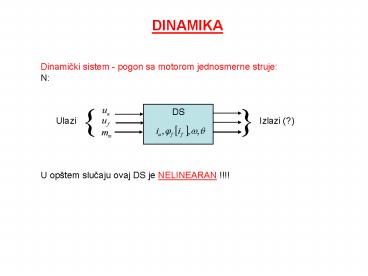
DINAMIKA
Dinamicki sistem - pogon sa motorom jednosmerne
struje N
U opštem slucaju ovaj DS je NELINEARAN !!!!
2
BLOK DIJAGRAM MATEMATICKOG MODELA POGONA
3
LINEARAN SLUCAJ
?f const.
Ovaj uslov eliminiše jednacinu pobudnog kola.
U prostoru stanja model pogona - dinamickog
sistema je
4
Blok dijagram u operatorskom domenu
5
LINEARIZOVANI SLUCAJ
Matematicki model nelinearnog dinamickog
sistema može se linearizovati u radnoj tacki,
odnosno u okolini radne tacke, stacionarnog
stanja. Na osnovu poznavanja vektora ulaza u
posmatranom režimu i jednacina stacionarnog
stanja može se odrediti odgovarajuca vrednost
vektora stanja .
Dinamicki sistem pogona sa nezavisno pobudenim
jednosmernim motorom, sad je
6
Koordinate vektora stanja u posmatranom slucaju
se dobijaju rešavanjem jednacina N
po ia0 ?f0 if0 ?0.
Cetvrta jednacina iz koje sledi da je ?0 0 je
izostavljena jer nas ogranicava na samo jedan
specijalan slucaj.
7
Odgovarajuci matematicki model u prostoru stanja
je
8
Ako za promenljivu stanja umesto ??f uzmemo ?if
matematicki model u prostoru stanja je
gde je
9
Blok dijagram u operatorskom domenu ako je
jedna od promenljivih stanja ??f N
10
Blok dijagram u operatorskom domenu kada je
promenljiva stanja ?if umesto ??f. N
11
VEKTOR IZLAZA
Kod dinamickog sistema kao što je ovaj ulazi se
obicno ne prosledjuju direktno na izlaz, pa je
Za
C I jedinicna matrica
Ako je
Na slican nacin može se odrediti matrica C i za
druge slucajeve.
12
ANALIZA DINAMICKIH REŽIMA
Metode - Funkcije prenosa - Polovi i sopstvene
vrednosti - Modelovanje. Primenu navedenih
metoda razmotricemo na najprostijem primeru u
kome je posmatrani dinamicki sistem LINEARAN.
?f const. i k? 0 necemo uzimati u
razmatranje trecu promenljivu stanja ?.
13
Funkcije prenosa
Operatorski domen. Blok dijagram koji odgovara
ovom slucaju je
Ulazi u sistem ua i mm .
Izlazi iz sistema, npr. ? i ia .
14
Funkcije prenosa koje se dobijaju poznatim
metodama, a pomocu blok dijagrama
15
Prostor stanja.
U prostoru stanja sistem jednacina je
16
Ako se usvoje isti izlazi kao u predhodnom
slucaju, onda je
17
zamenjujuci
Može se izvesti
H(p) - Matrica prenosa.
18
Pojedinacne funkcije prenosa
19
POLOVI I SOPSTVENE VREDNOSTI
Rešavanjem karakteristicne jednacine dobijaju se
polovi posmatranog dinamickog sistema pogona sa
nezavisno pobudenim motorom jednosmerne struje.
N
Sopstvene vrednosti sistema dobijaju se
rešavanjem jednacine
Rešenja su
20
Uticaj fluksa na raspored polova - sopstvenih
vrednosti. N
21
(No Transcript)
22
Uticaj momenta inercije ( mehanicke vremenske
konstante Tm ) na raspored polova - sopstvenih
vrednosti. N
23
(No Transcript)
24
Uticaj dodatog otpora na raspored polova -
sopstvenih vrednosti.
Karakteristicna jednacina može se napisati A
gde je
Polovi (sopstvene vrednosti) su
25
Ne sme se zaboraviti da je min?Ra Rad? Ra !!!!
26
PROCENA PONAŠANJA POGONA U TRANZIJENTNIM
STANJIMA POMOCU FUNKCIJA PRENOSA
Potrebno je odrediti ?y(t) za odgovarajuce
?u(t)
Egzaktna zavisnost dobija se inverznom Laplasovom
transformacijom
Za inženjerske potrebe dovoljno je napraviti
procenu na osnovu poznavanja -polova (
sopstvenih vrednosti ) -vrednosti ?y(0)
i -vrednosti ?y (?).
27
Karakteristicni ulazi - " step "
- " impuls "
28
Za posmatrani pogon
" step " " step " " impuls " " impuls "
t 0 t ? ? t 0 t ? ?
ua ? ? 0 ? ua / ?f 0 0
ua ? ia 0 0 ? ua / Ta Ra 0
mm ? ? 0 -? mm Ra / ?f2 -? mm / Tm 0
mm ? ia 0 ? mm / ?f 0 0
29
Odziv brzine motora na promenu napona indukta po
"step" funkciji (ua ? ?)
30
Odziv brzine motora na imulsnu promenu napona
indukta (ua ? ?)
31
Odziv brzine motora na promenu momenta
opterecenja po "step" funkciji (mm ? ?)
32
Odziv brzine motora na impulsnu promenu momenta
opterecenja (mm ? ?)
33
Odziv brzine motora na impulsnu promenu momenta
opterecenja (impuls duže traje u odnosu na
prethodni slucaj) (mm ? ?)
34
MODELOVANJE
Digitalni racunari i softverski
paketi. Mogucnosti - analiza nelinearnih
sistema - analiza stanja kod više istovremenih
poremecaja - interaktivan rad sa modelom -
istovremeno posmatranje više izlaza, ili
karakteristicnih velicina - utvrdjivanje
parametara sistema na osnovu poznavanja ulaza i
izlaza itd.
35
BLOK DIJAGRAM MODELA POGONA SA NEZAVISNO
POBUDJENIM JEDNOSMERNIM MOTOROM
N
36
Model DC motora u VisSim-u
37
Izgled bloka jednosmerni motor u razvijenom
obliku sa prethodne slike
38
Slika 1 start pogona u praznom hodu
Struja polaska je ogranicena dodatim otporom.
Prelazni proces je aperiodican.
39
Slika 2 start pogona u praznom hodu
Struja polaska ogranicena kao na slici 1 Prelazni
proces periodicno - prigušen
40
Slika 3 start pogona pod opterecenjem
Struja polaska ogranicena kao na slici 1 Prelazni
proces aperiodican
41
Slika 4 start pogona pod opterecenjem
Struja polaska ogranicena kao na slici 1 Prelazni
proces periodicno - prigušen
42
Slika 5 opterecenje
i potpuno rasterecenje
Prelazni procesi su periodicni sa jakim
prigušenjem
43
Slika 6 prelazak iz motornog u generatorski režim
44
Slika 7 rekuperacija usled snižavanja napona
indukta (moment opterecenja stalan
)
45
Slika 8 protivstrujno kocenje na prvi nacin
(moment opterecenja je potencijalan i stalan
)
46
Slika 9 dinamicko kocenje (moment opterecenja
stalan )
47
Slika 10 protivstrujno kocenje na drugi nacin
Recommended
CrystalGraphics Presentations





























