
Feedback system - PowerPoint PPT Presentation
1 / 25
Title:
Feedback system
Description:
How can we design a controller ? Controller must stabilize a given process. ... An Automatic Control Bonanza' : Lino guzzella. Plenary lecture ... – PowerPoint PPT presentation
Number of Views:38
Avg rating:3.0/5.0
Title: Feedback system
1
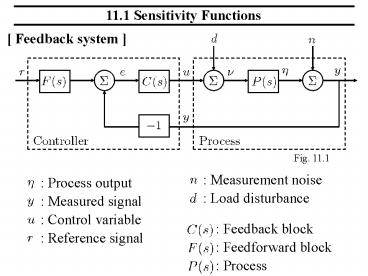
11.1 Sensitivity Functions
Feedback system
Fig. 11.1
Measurement noise
Process output
Load disturbance
Measured signal
Control variable
Feedback block
Reference signal
Feedforward block
Process
2
Feedback systems
Transfer functions
Fig. 11.1
..(11.1)
Gang of Six
..(11.2)
3
Error feedback
Fig. 11.1
Error feedback system ( )
Gang of Four
complementary sensitivity function
load sensitivity function
noise sensitivity function
sensitivity function
..(11.3)
4
Feedback systems
Fig. 11.1
General representation
Fig. 11.2
Fig. 11.2
5
Ex11.1
The loop transfer function gives only limited
insight
Fig. 11.1
Process
Loop transfer function
Controller
6
Ex 11.1
complementary sensitivity function
load sensitivity function
can be unstable
noise sensitivity function
sensitivity function
(b) Frequency response
(a) Step response
7
Internal Stability
Fig. 11.1
Internal stability
All of the Gang of Four are stable.
complementary sensitivity function
load sensitivity function
noise sensitivity function
sensitivity function
..(11.3)
8
Youla Parameterization ( 12.2)
How can we design a controller ?
- Controller must stabilize a given process.
Youla Parameterization
One of the controller design methods which makes
it possible to search over all stabilizing
controllers without the need to test stability
explicitly.
for stable process
Fig.12.8(a)
Fig. 11.1
for unstable process
Fig.12.8(b)
9
Youla Parameterization (stable process)
Fig. 11.1
stable process
Fig.12.8(a)
stable transfer function ( parameter )
Gang of Four
can be obtained by feedforward control
with the stable transfer function
All of these 4 transfer functions are stable.
stabilizing controller
...(12.8)
10
Youla Parameterization (unstable process)
unstable process
polynomial
stable polynomial
Fig.12.8(b)
stable rational function s.t.
stable rational function
controller
...(12.9)
11
-Break -
American Control Conference (ACC)
Lino guzzella
Plenary lecture
Automotive Systems -An Automatic Control
Bonanza
http//a2c2.org/conferences/acc2008/
12
Theory and Practice on Analysis and Design of
Linear Control Systems
Instructor
Masayuki Fujita
6 / 10, 6 / 17 , 6 / 24, 7 / 1, 7 / 8,
7 / 15, 7 / 22
Schedule
Textbook
1) K. J. Astrom and R. M. Murray, Feedback
Systems, Princeton University Press (2008)
1) Feedback Systems
Please ask TA by e-mail if you want a pdf of
this textbook.
Web
http//www.fl.ctrl.titech.ac.jp/course/SC/08SC/08S
C.html
13
Jun. 17th , 1st
11.1 Sensitivity Functions (12.2 Stability in the
Presence of Uncertainty)
Sensitivity function, Gang of Six, Gang of Four,
Youla parameterization
Keyword
11.3 Performance Specifications
(12.3 Performance in the Presence of Uncertainty)
Keyword
Sensitivity function, Uncertainty
Learning Objective
To understand the property of sensitivity
function.
14
11.3 Performance Specifications
Common features of frequency responses (
)
- Resonant peak maximum of the gain
- Peak frequency the frequency corresponding to
resonant peak. - Bandwidth the frequency range where
the closed loop gain is
of the low-frequency gain,
mid-frequency gain or high-frequency gain.
resonant peak
bandwidth
peak frequency
Frequency response ( )
15
Common features of time responses ( 5.3)
- Overshoot
- Steady-state value
- Rise time
- Settling time
step response
Fig. 5.9
16
Response to Load Disturbances and Measurement
Noise
open loop (feedforward)
closed loop (feedback)
Fig. 11.1
The sensitivity function tells how
the variations in the outputs are infulenced by
feedback.
Disturbances are attenuated.
Disturbances are amplified.
17
Response to Load Disturbances and Measurment
Noise
maximum sensitivity
stability margin (the shortest distance from
the Nyquist curve to the critical point(-1) )
Im
Re
(b) Nyquist plot
(a) Gain curves
Fig. 11.6(a)
Fig. 11.6(b)
18
Disturbance Attenuation ( 12.3)
Fig. 11.1
from load disturbance to output
...(12.11)
The response to load disturbances is insensitive
to process variations for frequencies where
is small.
19
Reference Signal Tracking ( 12.3)
from reference signal to output
...(12.15)
The sensitivity function around the nominal
values tells us how the tracking response varies
as a function of process perturbations.
20
Response to Load Disturbances and Measurement
Noise
from load disturbance to output
with integral action
for small
...(11.8, 11.9)
for large
from measurement noise to control signal
...(11.10)
for small
for large
21
Sensitivity Function and Complementary
Sensitivity Function
Complementary sensitivity function
small
big
big
small
tradeoff between and
22
Jun. 17th , 1st
11.1 Sensitivity Functions (12.2 Stability in the
Presence of Uncertainty)
Sensitivity function, Gang of Six, Gang of Four,
Youla parameterization
Keyword
11.3 Performance Specifications
(12.3 Performance in the Presence of Uncertainty)
Keyword
Sensitivity function, Uncertainty
Learning Objective
To understand the property of sensitivity
function.
23
Jun. 24th , 2nd
12.1 Modeling Uncertainty
Modeling uncertainty, Vinnicombe Metric
Keyword
12.2 Stability in the Presence of Uncertainty
Keyword
Complementary sensitivity function
Learning Objective
To understand the property of complementary
sensitivity function.
24
Excercise 1st
Response to Load Disturbances and Measurment
Noise
Fig. 11.1
noise filter
1) Plot responses of the output to a step
in the load disturbance and measurment noise
. 2) Plot the frequency responses. 3)
Consider what can be achieved by noise filter.
HINTS See example 11.4
25
Excercise 1st
Response to Load Disturbances and Measurment
Noise
Paper Number 1st Deadline Jun. 24 ,
1040am Submit to TA , Room S5-302 or
S512 (before the class starts)
Note
- You can write by anything (hand, tex, word,
...). - Please use A4 paper.
- Dont skip the transformation of equations.
- Please write Date of your submit, Student ID
Number, Name, Paper Number (1st, 2nd, ...),
Name of this class on the cover. - Japanese or English.
Recommended
CrystalGraphics Presentations





























