
References - PowerPoint PPT Presentation
1 / 1
Title:
References
Description:
... prototype for a biologically inspired tactile sensory modality for use in mobile ... which has scaled physical properties similar to rodent vibrissae, has ... – PowerPoint PPT presentation
Number of Views:71
Avg rating:3.0/5.0
Title: References
1
625.5
1 Artificial vibrissae
3 Reconfigurable logic for modelling neural
systems
Poster Summary
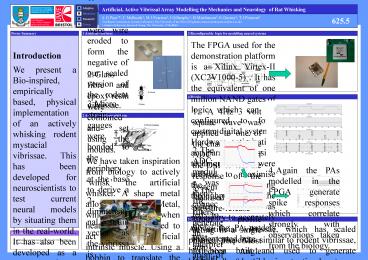
Introduction We present a Bio-inspired,
empirically based, physical implementation of an
actively whisking rodent mystacial vibrissae.
This has been developed for neuroscientists to
test current neural models by situating them in
the real-world. It has also been developed as a
prototype for a biologically inspired tactile
sensory modality for use in mobile robotics. It
is hoped that is will be useful for both spatial
orientation and surface textural discrimination
in confined visually occluded spaces. Methods Art
ificial vibrissae have been formed using
glass-fibre composite in a custom built mould,
incorporating both the inherent tapering and
curvature observed in rodent vibrissae. A test
platform has been built which can actively move,
or whisk, the artificial vibrissae using a shape
metal alloy called Bio-Metal. Four micro strain
gauges have been bonded to the periphery of the
artificial vibrissae at the base to derive an
absolute position vector of the vibrissae tip as
it is displaced during contact with obstructions.
The bridged, filtered and amplified voltages
across the gauges are sampled using the Analogue
to Digital Converter (ADC) module of a high speed
Digital Signal Processing (DSP) microcontroller.
Two strain profiles are then generated from these
absolute strain measurements using a pair of
Infinite Impulse Response (IIR) filters, the
parameters for which were chosen to match the
mechanical properties of the Follicle
Sinus-Complex (FSC) of a rat 1. These
biologically plausible strain profiles are sent
to a Field Programmable Gate Array (FPGA) which
has been configured to model the behaviour of a
large number of Primary Afferents (PA) of the
Trigeminal Sensory Ganglion in real-time.
Results The spike trains generated by the PA
models demonstrate that biologically plausible
behaviour can be reproduced by the system. Both
Rapidly Adapting (RA) and Slowly Adapting (SA)
models have been implemented in real-time with a
level of accuracy consistent with models
previously developed in simulation. Conclusions T
his system can be used to establish a more
complete biologically plausible model of the
whisker sensory system of a rodent. Further more
the use of embedded electronics allows it to be
used on autonomous robotic vehicles for situated,
real-time model validation and experimentation.
The FPGA used for the demonstration platform is a
Xilinx Virtex-II (XC2V1000-5) . It has the
equivalent of one million NAND gates of logic
which can be configured to form custom digital
systems. Hardware optimisation and parallel
processing techniques were utilised to maximise
the processing throughput of the system which was
necessary to accurately model the PA models
implemented here.
1. Aluminium moulds were wire eroded to form
the negative of our scaled version of the rodent
vibrissae.
2. Glass fibre and epoxy resin were combined and
set using the moulds.
3. Micro strain gauges were bonded to the
periphery at the base to derive a 2-dimmensional
strain vector as the vibrissa is deformed.
4 Results
1. A 4Hz 3 volt square wave was applied to one
of the channels of the ADC module of the DSP to
test the response of the system to an idealised
contact-pressure-release strain profile acting in
a single plane. The Most Effective Angle (MEA) of
the Primary Afferents (PA) in the FPGA were
distributed uniformly around the follicle and
were individually parameterised to form
populations of RA and SA models. The results show
that the various PA species modelled by the
system do respond as expected to this simple
strain profile.
2 Artificial whisking platform
2. The ADC module was then connected to the
pre-amp circuitry of the artificial whisker which
was then deflected to generate a step input
stimulus principally in the x plane.
We have taken inspiration from biology to
actively whisk the artificial whisker. A shape
metal alloy called BioMetal, which contracts when
heated, has been used to act as an artificial
intrinsic muscle. Using a bobbin to translate the
linear displacement of the BioMetal into a
rotation of the shaft to which the whisker is
attached, the whisker is actively protracted. A
spring passively retracts the whisker, which is
analogous to the elasticity of the skin of the
mystatical pad of the animal. A dsPIC
microcontroller is used to generate a Pulse Width
Modulated (PWM) signal to heat the BioMetal in a
controlled manner. Combined with an optical Shaft
encoder, local autonomous control of the whisker
is possible. However, in the near future we plan
to use a brain-based-modelling approach to
generate the drive signal using a low level
neural feedback loop which has been recently
developed. 2
4. Again the PAs modelled in the FPGA generate
spike responses which correlate strongly with
observations taken from the biology.
3. The IIR filters, generate an interpretation of
the mechanical affect of the Mesenchymal sheath
and Root sheath of the FSC on the deformation
from the whisker.
5 Conclusions further work
An artificial vibrissae, which has scaled
physical properties similar to rodent vibrissae,
has been built and used to generate biologically
plausible input stimulus to an embeddable,
real-time model of the Follicle Sinus-Complex of
a rodent. This artificial vibrissae can be
actively whisked using a shape metal alloy in a
manner analogous to natural whisking. The output
from this system is a large number of spike
trains generated from empirically based models of
the Primary Afferents of the Trigeminal sensory
Ganglion of a rat. From this demonstration
platform an array of such vibrissae will be built
and used as the sensory front-end of a more
complete whisker sensory pathway model developed
by neuroscientists. This model will be situated
on a mobile robotic platform to physically
demonstrate behaviours analogous to those
observed in whiskered animals.
References
- Mitchinson et al. (2004) Royal Society Proc. (B)
271(1556)2509-16. - Mitchinson et al. (2005) SfN abstract no. 625.4.
Recommended
CrystalGraphics Presentations





























