
Diapositive 1 - PowerPoint PPT Presentation
1 / 20
Title:
Diapositive 1
Description:
Ajouter un contr le proportionnel pour am liorer le temps de mont e Tr ... Ajouter un contr le int gral pour annuler l'erreur statique. Ajuster les param tres Kp, Kd, ... – PowerPoint PPT presentation
Number of Views:75
Avg rating:3.0/5.0
Title: Diapositive 1
1
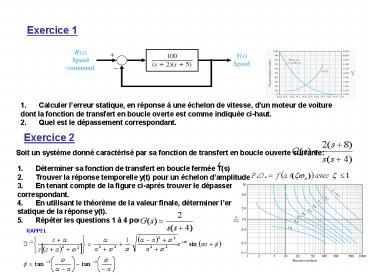
Exercice 1
- Calculer lerreur statique, en réponse à une
échelon de vitesse, dun moteur de voiture - dont la fonction de transfert en boucle overte
est comme indiquée ci-haut. - 2. Quel est le dépassement correspondant.
Exercice 2
Soit un système donné caractérisé par sa fonction
de transfert en boucle ouverte suivante
z
- Déterminer sa fonction de transfert en boucle
fermée T(s) - Trouver la réponse temporelle y(t) pour un
échelon damplitude A. - En tenant compte de la figure ci-après trouver le
dépassement - correspondant.
- En utilisant le théorème de la valeur finale,
déterminer lerreur - statique de la réponse y(t).
- Répéter les questions 1 à 4 pour
2
Exercice 3
Linjection de linsuline à un diabétique avec un
procédé de control constitué dune pompe et dun
capteur qui mesure le niveau de sucre dans le
sang est bien meilleure pour le malade. Le
système en question est représenté par la figure
ci-après, sachant que R est le niveau désiré du
niveau de sucre dans le sang, et Y en est le
niveau exact.
Calculer le gain K qui permet davoir un
dépassement de 7 en réponse à une échelon de
dinjection de médicament.
Exercice 4
Le système de contrôle pour positionner la tête
de lecteur de disquette est caractérisé par
la Fonction de transfert en boucle fermée
suivante
Esquisser le placement des pôles et des zéros de
ce système et discuter la dominance des pôles
complexes. Quel est le dépassement attendu.
3
Exercice 5
Le système de contrôle de la figure (a) ci-après
donne une réponse à un échelon unitaire
comme celle montrée dans la figure (b), quand
K1. déterminer la valeur de K pour que lerreur
statique Soit complètement nulle.
4
RAPPEL
5
Solution exercice 1
6
Solution exercice 2
Les pôles dominants ont la partie réel -3
7
Solution exercice 3
8
Solution exercice 4
9
Exercice 5
- Il sagit de concevoir les paramètres K1 et K
tels que - P.O. lt 10 pour une réponse à un échelon unitaire
de la commande r(t). - Lerreur statique à une commande de type rampe
soit la minimum possible. - Leffet dune perturbation échelon soit réduit.
10
Solution Dans un premier temps la simplification
suivante simpose.
11
Lerreur statique à une commande de type rampe
r(t)B.t, soit la minimum possible.
Lerreur statique à un échelon unité de
perturbation
Donc on cherche - le plus grand K (pour
minimiser linfluence des perturbations), - le
plus large possible K/K1 pour minimiser lerreur
statique à une commande de type rampe, et - P.O.
lt 10 ? z0.6 pour limiter le dépassement
12
Pour sélectionner K sachant que z0.6, léquation
caractéristique doit être
Exemples
Comme dans la réalité, on doit limiter K pour
maintenir le système dans la zone linéaire, si
on prend K100, nous avons
13
Contrôleur PID
Gc(s)
G(s)
14
Pour concevoir un contrôleur PID
Règles à suivre pour la conception din
contrôleur PID pour un système donné, en vue
dobtenir une réponse désirée.
- Obtenir la réponse en boucle ouverte, et
déterminer ce quil ya lieu dAméliorer - Ajouter un contrôle proportionnel pour améliorer
le temps de montée Tr - Ajouter un contrôle dérivatif pour améliorer le
dépassement P.O. - Ajouter un contrôle intégral pour annuler
lerreur statique - Ajuster les paramètres Kp, Kd, et Ki jusquà
obtenir la réponse globale désirée. - Note Se référer à la table de la page 13 pour
trouver quel est le type de controleur qui
contrôle quelle caractéristique.
Il convient de retenir quon est pas obligé
dimplémenter les 3 types de contrôleurs (P, I,
D) dans le système à contrôler si ce nest pas
nécessaire. Par exemple, si un contrôle PI
donne une réponse déjà satisfaisante, il est
inutile dajouter le contrôle de dérivation D.
Laisser le contrôle aussi simple que possible.
15
Exemple 1 Contrôle de la vitesse de moteur DC
Si J0.01 b0.1 KbKm0.01 Ra1 La0.5
Concevoir un PID pour qu
En réponse à un échelon de 1 rad./s, les critères
de la réponse doivent être - Temps de réponse
Ts (Settling time) lt 2 secondes- P.O. lt 5-
Erreur statique lt 1
16
Réponse en Boucle Ouverte
J0.01 b0.1 Kb0.01 Km0.01 Ra1 La0.5
numKm den(JLa) ((JRa)(Lab))
((bRa)KmKb) step(num,den,00.13)
title('Réponse à un échelon du système en BO ')
17
Contrôle proportionnel
Kp100 numaKpnum denaden numac,denac
cloop(numa,dena) step(numac,denac,00.013)
title('Réponse à un échelon du système en BF avec
Kp ')
Noter lerreur statique et le dépassement
18
Contrôle PID
Rappelant que le terme intégral élimine lerreur
statique et le terme dérivative du contrôleur PID
réduit le dépassement. Essayant un contrôleur
PID avec de petites valeurs de Ki et Kd.
Kp100 Ki1 Kd1 numcKd, Kp, Ki denc1
0 numaconv(num,numc) denaconv(den,denc)
numac,denaccloop(numa,dena)
step(numac,denac)title(Contrôle PID avec de
petites valeurs de Ki et Kd')
Conclusion??
19
Ajustement des gains
On remarque de la réponse précédente que le temps
de réponse Ts est vraiment très long. Augmentant
Ki pour le réduire. On refait létape précédente
avec Ki 200.
Kp100 Ki200 Kd1 numcKd, Kp, Ki denc1
0 numaconv(num,numc) denaconv(den,denc)
numac,denaccloop(numa,dena)
step(numac,denac) title('Contrôle PID avec une
grande valeur de Ki')
20
Maintenant la réponse est plus rapide, mais
laugmentation de Ki a détérioré la réponse
transitoire avec le dépassement. Pour le diminuer
augmentant Kd à 10.
Kp100 Ki200 Kd10 numcKd, Kp, Ki denc1
0 numaconv(num,numc) denaconv(den,denc)
numac,denaccloop(numa,dena)
step(numac,denac) title('Contrôle PID en
augmentant Kd')
Enfin les paramètres du contrôleur PID sont Kp
100,Ki 200,Kd 10, Qui répondent
parfaitement à nos spécifications de départ.
Recommended
CrystalGraphics Presentations





























