
SLAAC Technology - PowerPoint PPT Presentation
1 / 54
Title:
SLAAC Technology
Description:
SLAAC Technology Tower of Power Goal: ACS research insertion into deployed DoD systems. Distributed ACS architecture for research lab and embedded systems. – PowerPoint PPT presentation
Number of Views:162
Avg rating:3.0/5.0
Title: SLAAC Technology
1
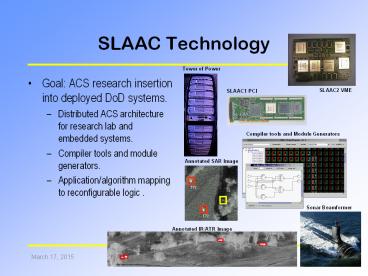
SLAAC Technology
Tower of Power
- Goal ACS research insertion into deployed DoD
systems. - Distributed ACS architecture for research lab and
embedded systems. - Compiler tools and module generators.
- Application/algorithm mapping to reconfigurable
logic .
SLAAC2 VME
SLAAC1 PCI
Compiler tools and Module Generators
Annotated SAR Image
Annotated IR/ATR Image
2
SLAAC Affiliates
3
Application Challenges
- SLAAC applications have a variety of physical
form factors and scalability requirements. - However, most development will occur in
university labs.
NVL IR/ATR
Sandia SAR/ATR
NUWC Sonar Beamforming
4
SLAAC Approach
- SLAAC defines a scalable, portable, distributed
systems architecture based on a high speed
network of ACS accelerated nodes.
- SLAAC has created
- Family of ACS accelerators in multiple form
factors. - ACS system level API and runtime environment.
- ACS design/debugging tools.
5
Research Reference Platform
- RRP is network of ACS-accelerated workstations.
- Inexpensive readily available COTS platform for
ACS development. - Tracks performance advances in workstations,
commodity networking, and ACS accelerators. - Friendly environment for algorithm development
and application debugging.
- ACS accelerator is PCI-based.
- OS is NT or Linux.
- Network is simple Ethernet or high speed such as
Myrinet.
6
Deployable Reference Platform
- DRPs are embedded implementations of RRP
architecture. - ACS cards converted from PCI to VME.
- Source-code compatible with RRP.
- Carriers provide increasing levels of compute
density.
VME
Network
- Simplest carrier is a cluster of single-board
computers. - ACS hardware is VME-based.
- OS is VxWorks.
- Network is Myrinet SAN.
7
Topics
- Hardware
- Reference Platforms
- Research Reference Platform (RRP)
- Deployable Reference Platform (DRP)
- ACS Hardware
- SLAAC-1 PCI
- SLAAC-2 VME
- SLAAC-1V Virtex PCI
- Software
- System Layer Software
- Programming Model
- ACS API
- FPGA Design Environments
- VHDL
- JHDL
8
Accelerator Hardware
9
SLAAC1 PCI Architecture
- Full-sized 64-bit PCI card.
- One XC4085 and two Xilinx XC40150s (750K user
gates). - Twelve 256Kx18 ZBT SSRAM memories (gt5MB user
memory). - External I/O connectors.
- Xilinx 4062 PCI interface.
- Two 72-bit FIFO ports.
- External memory bus.
- 100MHz programmable clock.
72/
72 /
10
Processing Element
- One Xilinx 40150 FPGA and four 256Kx18 SSRAMs.
- Optimized for left-to-right data-flow or SIMD
broadcast. - Two 72-bit ring connections to left and right
neighbor. - One 72-bit shared crossbar connection.
- External I/O control.
- Designed for partitioning into four virtual PEs
to improve pipelining/floor-planning. - Memories can accessed by external memory bus.
X1
Xilinx XC40150XV-09 - 72x72 CLB Matrix (5184) -
100K-300K gate equivalent
Micron ZBT 256Kx18 SSRAM - zero bus turnaround -
100MHz bus cycle
11
External Memory Bus
- Interface halts user clock and tristates FPGAs to
externally access memory. - No arbiter logic or handshaking required in user
FPGAs. - Access takes zero PCLK time.
M1
X1
?
?
CE (transceiver chip enable, 1 per memory)
GTS (global tri-state)
PCLK (processor clock)
External Memory Bus
MCLK (memory clock)
ADDR/CTRL (22)
DATA (18) (R/W drives transceiver direction)
12
Control Element
- One Xilinx 4085 and two 256Kx18 SSRAMs.
- Designed as user control unit and data-flow
manager. - Two 72-bit FIFO connections to IF interface chip.
- Two 72-bit ring connections to left and right
neighbor. - One 72-bit shared crossbar.
- Memories can be used for pre/post processing of
data. - Alternatively can support two additional
virtual processors.
X0
Xilinx XC4085XLA-09 - 56x56 CLB Matrix (3136) -
55K-180K gate equivalent
Micron ZBT 256Kx18 SSRAM - zero bus turnaround -
100MHz bus cycle
13
Interface Chip
?
?
- One Xilinx 4062 FPGA and two 256Kx18
configuration SSRAMs. - Software updateable EEPROM loads IF at power-up.
- Implements PCI interface controls configuration,
clock, and power monitor. - One 86-bit PCI-64 interface.
- Two 72-bit FIFO connections to X0 control
element. - One external memory bus to all memories on board.
- Miscellaneous control lines.
IF
?
Xilinx XC4062XLA-09 - 48x48 CLB Matrix (2304) -
40K-130K gate equivalent
Micron ZBT 256Kx18 SSRAM - zero bus turnaround -
100MHz bus cycle
14
FIFO Model
- FIFOs in IF chip.
- X0 can select from four input and four output
FIFOs on FIFOA and FIFOB ports. - FIFOs are 68 bits (4-bit tag).
- DMA engine monitors FIFO states and copies data
to/from host buffers. - This is much more efficient than host-based
accesses because no back pressure is needed.
X0
B
A
IF
?
?
?
?
?
?
?
?
DMA
PCI core
15
SLAAC1 Front
Memory Module (3)
SLAAC-1 PCI
16
SLAAC-1 Back
QC64 I/O
17
CSPI M2641/S Carrier
- CSPI is a commercial VME multicomputer vendor
used by Sandia and LMGES. - CSPI modified their M2641 Quad PowerPC baseboard.
- Both PowerPC busses from baseboard brought to
connectors. - Two PowerPCs on mezzanine replaced with SLAAC
technology.
CSPI 2641Quad PowerPC Board 1.6 GFLOPS Quad
PowerPC Four Myrinet SANs in 6U Slot 1.28
GBytes/s I/O with 4 Myrinet SANs 64 to 256 MB
On-Board Memory I/O Front Panel VME64 PO
Backplane Active and Passive Multicomputing
Software MPI, ISSPL
18
CSPI Baseboard
PPC 603
Myricom LANai
Future PPC Connector
SAN connector
Myricom 8-port Switch
VME Myrinet P0 connector
19
CSPI M2621S
- 2 - PPC603_at_ 200 MHz.
- 40MHz PPC Bus
- Integrated Myrinet SAN network
20
SLAAC2
- Two SLAAC1 architectures on 6U VME mezzanine.
- Both PowerPC processors are ACS accelerated.
- Equivalent to two PCs with SLAAC1 PCI boards.
- Merged power supply and interface boot components
to save space.
SLAAC2 6U Mezzanine
Power PC Bus Connectors
21
SLAAC2 Architecture
- Two independent SLAAC1 boards in single 6U VME
mezzanine. - Four XC40150s, two XC4085s - 1.5M gates total.
- Twenty 256Kx18 SSRAMs.
- Sacrificed external memory bus.
40 /
40 /
72/
72/
22
SLAAC2 Front
23
SLAAC-2 Back
24
Second Generation Hardware
- Goals
- Remain VHDL compatible with SLAAC-1 and move to
Virtex. - Provide experimental platform for fast partial
runtime reconfiguration. - Support three simultaneous systolic high-speed
data streams. - Increase memory width to 36 bits for hungry
Virtex apps. - Support memory bank swapping on the fly.
- Techniques
- Merge X0 and IF devices to improve compute
density. - Use Xilinx Virtex PCI-64/66.
- Support Xilinx BoardScope configuration/readback
interface. - Continue support for LANL QC-64 ports and add
third I/O on front side of board.
25
SLAAC-1V Architecture
- Three Virtex 1000.
- 3M logic gates _at_ 200MHz.
- Use Xilinx 64/66 core.
- Virtex100 configuration controller, FLASH,
SRAM. - Ten 256Kx36 ZBT SRAMs.
- Bus switches allow single-cycle memory bank
exchange between X0 and X1/X2. - Three I/O connectors.
- Three port crossbar gives access to other FPGAs
or local external I/O connector.
X1
X2
72
60
X
X
X
72
X0
IF
X0
72
72
User
Interface
CC
F
S
64/66 PCI
26
Configuration Controller
- Virtex 100 acts as configuration controller.
- Boot IF/X0 from FLASH or reboot from SRAM on the
fly. - Dynamic runtime partial reconfiguration of X1 and
X2. - Explore IF/X0 partial self-configuration.
- Configuration Memories.
- SRAM for configuration and readback cache.
- FLASH for stable default boot.
X1
X2
72
72
X0
IF
X0
72
72
S
F
CC
PCI
- SelectMAP
- 15ms for whole chip.
- lt1ms partial column configuration.
27
Floorplanning on XP
- Port locations designed to allow two identical
VPEs per XP chip (total of 4). - Both X1 and X2 are bitfile compatible.
M0 M3
XP
L R
X
28
Floorplanning on X0
- 50 of the chip is intended to be user
programmable. - 50 is the interface.
- Challenge is how to define the X0/IF boundary.
L R
xbar
X0
M0 M1
IF
XV100
MSC
PCI
29
External I/O Support
- Bus exchange switch allows each FPGA to access
either shared crossbar bus or local external I/O
connector.
a)
b)
c)
30
Memory Bank Switching
- X0 can swap x0m0 with any memory on X1 and x0m1
with any memory on X2.
- Easy external memory bus implementation or
user-level double-buffering.
31
SLAAC-1V Front
- Two memory daughter cards, one for X1, one for
X2, X0 connects to both.
- Add an I/O card on front to get access to
connector space.
Memory Card
Memory Card
I/O Card A
32
SLAAC-1V Back
- Support LANL QC64 format I/O connectors for
high-speed external I/O.
- Combined with front panel, gives three external
I/O ports!
I/O Card B (QC64 IN)
I/O Card C (QC64 OUT)
33
SLAAC-1V
- Hardware arrived Dec 21 and is being tested now.
34
Software
35
Programming Model
- ACS API defines a system of nodes and channels.
- System dynamically allocated at runtime.
- Channels stream data between FIFOs on host/nodes.
- API provides common control primitives to a
distributed system. - configure, readback, set_clock, run, etc.
Hosts
Nodes
Network
36
Network Channels
- Use network channels in place of physical
point-to-point connections.
- Boards operate on individual clocks, but are
data-synchronous. - Channels can apply back-pressure to stall
producers.
Network-channel
37
Programmable Topology
- Channels allow data to flow through the system
with a programmable topology.
- Adds multiple dimensions of scalability.
- Channel topology can be changed dynamically.
38
System Creation Functions
- ACS_Initialize.
- Parses command line.
- Initializes globals.
- ACS_System_Create.
- Allocates nodes.
- Sets up channels.
- Creates an opaque system object in host program.
2
0
3
1
0
2
1
3
- Nodes and channels are logically numbered in
order of creation. - Host is node zero.
39
Memory Access Functions
- ACS_Read().
- Gets block of memory from (system, node, address)
into user buffer. - ACS_Write().
- Puts block of memory from user buffer to (system,
node, address).
- ACS_Copy().
- Copies memory from (node1, address1) to (node2,
address2) directly. - ACS_Interrupt().
- Generates an interrupt signal at node.
40
Streaming Data Functions
- ACS_Enqueue()
- put user data into FIFO
- ACS_Dequeue()
- get user data from FIFO
- Each node/system has a set of FIFO buffers.
- Channels connect two FIFO buffers.
- Arbitrary streaming-data topologies supported.
1
FIFO 0
0
FIFO 1
FIFO 2
2
FIFO 3
41
Convenience Functions
- Provide a standard API for common control
functions. - Generic interface to hardware-specific routines
using jump tables. - Hardware developers provide device library.
- ACS_Configure().
- ACS_Readback().
- ACS_Run().
- ACS_Set_Clock().
- ...
42
System Management
- Permit resource allocation to adapt to runtime
requirements. - Other system status and environment inquiry
functions need to be defined here.
- ACS_Node_Add().
- ACS_Node_Remove().
- ACS_Chan_Add().
- ACS_Chan_Remove().
- ...
0
3
2
3
4
43
Groups
- A group is a subset of system nodes.
- Provides alternative ordering.
- Limits scope of broadcast operations.
- Group can be used in place of system for all ACS
functions.
- ACS_Group_Create()
- ACS_Group_Destroy()
System
Group
1
1
0
2
2
3
44
Requests
- Requests define a sequence of ACS operations on
system. - Amortize message layer overhead.
- Supports non-blocking operations.
- Requests can be setup once and reused.
- ACS_Request_Create().
- Allocate object to store requested operations.
- ACS_Commit().
- Initiates requested actions.
- ACS_Wait().
- Wait until all requested actions complete.
- ACS_Test().
- Test request status without blocking.
45
Blocking versus Non-blocking
fread() ACS_Write() ACS_Read()
fread() ACS_WriteN() ACS_ReadN() ACS_Commit() frea
d() ACS_Wait() ACS_Commit() fread() ACS_Wait()
Write ... ACK Read DATA
Write Read.. ACK/DATA
fread() ACS_Write() ACS_Read() fread()
Write Read.. ACK/DATA
Write ... ACK Read DATA
46
Implementation Strategy
- Communication.
- Rely on MPI for high-performance communication
where available. - When MPI not available or convenient, tightly
couple network ACS hardware. - Portability.
- Limited new code is required to extend API
implementation for a new ACS board. - Control program for compute nodes is simple
enough to run w/o complex OS.
47
The Virginia Tech SLAAC Team
- Dr. Peter Athanas
- Dr. Mark Jones
- Heather Hill
- Emad Ibrahim
- Zahi Nakad
- Kuan Yao
- Diron Driver
- Karen Chen
- Chris Twaddle
- Jonathan Scott
- Luke Scharf
- Lou Pochet
- John Shiflett
- Peng Peng
- Sarah Airey
- Chris Laughlin
48
API Implementation Status
- Completed implementation of v1.0 of API
- Implemented in C (callable from C)
- Software NT MPI (WMPI MPI-FM)
- Hardware WildForce, SLAAC-1 PCI
- Runs on the Tower of Power
- 16-node cluster of PCs
- WildForce board on each PC
- Myrinet network connecting all PCs
49
Performance Monitor
- Dynamic topology display
- Performance Metrics
- Playback (future)
- Use to confirm the configuration of the system
- Use to identify performance bottlenecks
50
ACS Multiboard Debugger
- Based on Boardscope and Jbits
- Will provide
- Waveforms
- State Status
- Channel Status
- Interfaces through SLAAC API
51
Why Use This API?
- Single Board Systems
- API closely matches accepted APIs, e.g. AMS
Wildforce Splash - Virtually no overhead
- Your application will port to SLAAC
- Multi Board Systems
- Single program for multi-node applications
- Inherent management of the network
- Zero sided communication
- Its FREE
52
Future Work
- Support for Linux in addition to NT.
- Available in the next release.
- Support for Run-Time Reconfiguration (RTR).
- Extension to SLAAC-1 2 boards.
- API implementation for embedded systems.
- System level management of multiple programs.
53
Summary
- Latest versions of source code and design
documents available for download - For more information visit TOP websitehttp//acam
ar.visc.ece.vt.edu/
54
Design Environments
Recommended
CrystalGraphics Presentations





























