
Bread Boarding and Operating - PowerPoint PPT Presentation
Title:
Bread Boarding and Operating
Description:
Become familiar with the parts and terminology associated with the basic ... Spike wired to actuate the solenoid of an SMC Pneumatic valve. Positive 12V Buss. 12V Gnd ... – PowerPoint PPT presentation
Number of Views:43
Avg rating:3.0/5.0
Title: Bread Boarding and Operating
1
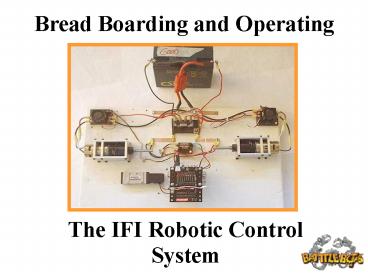
Bread Boarding and Operating
The IFI Robotic Control System
2
This Slide Show will help the BattleBots IQ
Participants
Become familiar with the parts and terminology
associated with the basic operation of the IFI
Robot control system.
Set up and operate the IFI Robot Control system
using the default control functions.
There is no substitute for reading the IFI
Manual! Download it now!
3
The IFI Robot Control System
The IFI Robot Control System is comprised of two
sub systems The Operator System and the Robot
Control System
The Operator system This System accepts control
inputs from the human operator through joysticks,
switches and potentiometers. The systems also
displays input/output data sent to and received
from the robot
Robot Control System
Includes Onboard IFI control components such as
the Robot Controller, Data Modem, PC board,
Victor Speed Controllers and Spikes.
4
The IFI Robot Control System
The Robot Controller
The IFI Robot Control System Components 1.)
Programmable Robot Controller and Data Modem 2.)
Mechanically mountable PC Board with PWM and
relay connectors, serial port, and LED
status display. 3.) Victor PWM speed
controllers 4.) IFI Spike Relay controller.
Slides 5 12 describe the parts and illustrate
the basic set up of the Robot Controller.
5
Robot Controller System
Potentiometers 0-5v Sensors
Master Processor
1.) Receive data from Radio 2.) Read analog
Inputs (on robot) 3.) Read digital Inputs (on
robot) 4.) Send Data to BS2SX 5.) Send Data to
Radio 6.) Repeat
Switches
BS2SX (Pbasic Processor)
Servos Speed Controllers
1.) Input Serial Data 2.) Process Data 3.) Output
Dashboard Bits 4.) Output Serial Data 5.) Repeat
Small Motors, Solenoids, Lights
Output Processor
1.) Input Serial Data 2.) Output PWM Signals 3.)
Output Relay Signals 4.) Repeat
6
The IFI Robot Control System
The Robot Control Module
The Robot Control Module Contains Radio, Input
Processor, Pbasic Processor, Output Processor
The Robot Control Module plugs into dual keyed
40 pin headers on the underside of the Robot
Control PC Board. The PC Board is populated with
input/output pins, a PBASIC memory Chip, fuse,
Team ID dips and an LED Status Display.
7
The IFI Robot Controller PC Board
Digital Inputs sw 1-sw 8
Status LEDs
Digital (Relay) Outputs RLY1-RLY4
Mounting Holes
Programming/Tether Port
Program/Tether Switch
Team DIP Switch
Power Switch
Battery Connector
Analog Outputs PWM
Analog Inputs AN1 AN4
8
Connecting the Victor Speed Controller
To 12V Battery
To PWM 1
To Traction Motor
Robot Controller PC Board
9
IFI Robot Control System
Victor PWM Speed Controller Wired to a modified
drill motor and transmission
10
Connecting the IFI Spike
The Spike is a 20 Amp H-Bridge relay controlled
by a PWM Output on the IFI Robot Controller PC
Board
To 12V Battery
PWM To RLY1
To Weapon Motor, Relay, etc.
Robot Controller PC Board
11
IFI Robot Control System Spike
12V Gnd
Positive 12V Buss
Spike wired to actuate the solenoid of an SMC
Pneumatic valve
12
Weapon System
Right Motor
Left Motor
-
-
Computer
SPIKE
Speed Controllers
M
M
M-
M-
gnd
12V
-
-
Fuses
To PWM1
Relay 1
To PWM2
-
12 Volt Battery
Robot Controller Schematic
13
The Operational Robot Control System
CAUTION ALWAYS OBSERVE POLARITY!
Recommended
CrystalGraphics Presentations





























