
ACCIONES DE CONTROL CLSICO - PowerPoint PPT Presentation
1 / 16
Title:
ACCIONES DE CONTROL CLSICO
Description:
Esto hace que el cruce por cero se mueva hacia la izquierda y el margen de fase ... esto basta con colocar ?m en una frecuencia mucho menor que el cruce por cero ?g' ... – PowerPoint PPT presentation
Number of Views:33
Avg rating:3.0/5.0
Title: ACCIONES DE CONTROL CLSICO
1
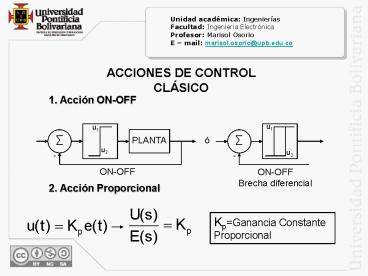
ACCIONES DE CONTROL CLÁSICO
Unidad académica Ingenierías Facultad
Ingeniería Electrónica Profesor Marisol Osorio E
mail marisol.osorio_at_upb.edu.co
- 1. Acción ON-OFF
- 2. Acción Proporcional
2
ACCIONES DE CONTROL CLÁSICO (CONT.)
- 3. Acción Integral (Reset)
KiConstante Integral
3
ACCIONES DE CONTROL CLÁSICO (CONT.)
- 4. Acción Proporcional-Integral.
- Respuesta ante un error constante.
4
ACCIONES DE CONTROL CLÁSICO (CONT.)
- 5. Acción Proporcional Derivativa.
- Acción Derivativa Control de velocidad.
- La magnitud de la salida del controlador es
proporcional a la velocidad de cambio de la señal
de error.
5
ACCIONES DE CONTROL CLÁSICO (CONT.)
- 6. Acción Proporcional Integral Derivativa.
6
CONTROLADORES DE FASE
- Su objetivo es incrementar los márgenes de
ganancia y fase de los sistemas realimentados por
medio de la adición de polos y ceros al sistema. - La función de transferencia general de un
controlador de fase es
7
CONTROLADOR DE ADELANTO
- El objetivo de este controlador es incrementar el
margen de fase del sistema dada la característica
de frecuencia y fase del controlador de adelanto
8
CONTROLADOR DE ADELANTO
- Las frecuencias de corte del diagrama de Bode de
este sistema se encuentran en ?1/aT y ?1/T. El
valor máximo de fase positiva que puede entregar
el sistema se llama øm y ocurre en una frecuencia
?m, que se encuentra en la media geométrica entre
las dos frecuencias de corte.
9
CONTROLADOR DE ADELANTO
De donde puede despejarse que
10
CONTROLADOR DE ADELANTO
Obsérvese que la fase del controlador puede
escribirse
Con lo que
11
CONTROLADOR DE ADELANTO
Si se hace ??m entonces ?Gc(s)øm y
Con lo que
12
CONTROLADOR DE ADELANTO
- El procedimiento para diseñar el controlador es
entonces así - La constante de ganancia K se halla con el
requerimiento de error en estado estable del
sistema. Este es un valor preliminar que luego
tiene que ser ajustado. - Se dibuja el diagrama de Bode del sistema a
controlar en serie con la ganancia obtenida en el
paso anterior. - Se determina el margen de fase que se desea para
el sistema controlado y con este valor se
determina øm para el controlador.
13
CONTROLADOR DE ADELANTO
- El valor de a se calcula de la ecuación (b).
- Es necesario que el mayor adelanto de fase del
controlador quede en una frecuencia tal que
coincida con la frecuencia de cruce por cero de
la gráfica de Bode del sistema controlado, de tal
manera que el margen de fase adicional si se
aproveche. Esto se consigue ubicando la ?m en la
frecuencia en la que la ganancia del sistema sin
controlar es -10log10a db. - Entonces T se puede calcular con la ecuación (a).
- Se obtienen las trazas de Bode de la trayectoria
directa del sistema compensado y la respuesta al
paso del sistema controlado y se verifica si las
condiciones de diseño se cumplen.
14
CONTROLADOR DE ATRASO
- El objetivo del controlador de atraso, más que
incrementar directamente el margen de fase, es
disminuir la ganancia del sistema, usando la
atenuación máxima de 20log10a que tiene el
controlador. Esto hace que el cruce por cero se
mueva hacia la izquierda y el margen de fase se
incrementa por las características propias del
sistema.
15
CONTROLADOR DE ATRASO
- El procedimiento del diseño del controlador de
atraso es - El valor de K se calcula con los requerimientos
del error en estado estable. - Se obtiene la traza de Bode de la trayectoria
directa del sistema en serie con la ganancia. - Sobre este diagrama de Bode se localiza la
frecuencia a la cual el sistema tiene el margen
de fase deseado (?g). - La ganancia del sistema a esa frecuencia
determina el valor de a así
16
CONTROLADOR DE ATRASO
- El valor de T se calcula de tal manera que el
atraso de fase que tiene naturalmente el
controlador no afecte el margen de fase obtenido.
Para asegurar esto basta con colocar ?m en una
frecuencia mucho menor que el cruce por cero ?g.
Para esto
Recommended
CrystalGraphics Presentations





























