
681 - Introduction to Computer Graphics - PowerPoint PPT Presentation
1 / 18
Title:
681 - Introduction to Computer Graphics
Description:
Given desired goal position of end effector: (x,y) Analytically ... Compute instantaneous effect of each joint - Linear approximation to curvilinear motion ... – PowerPoint PPT presentation
Number of Views:13
Avg rating:3.0/5.0
Title: 681 - Introduction to Computer Graphics
1
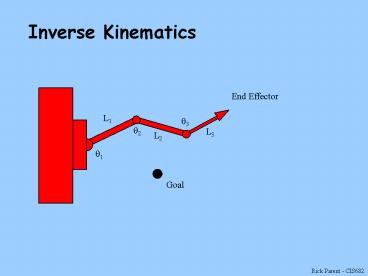
Inverse Kinematics
End Effector
L1
q3
q2
L3
L2
q1
Goal
2
Inverse Kinematics
Given arm configuration (q1, q2)
Given desired goal position of end effector (x,y)
Analytically compute goal configuration (y1,y2)
Interpolate pose vector from initial to goal
3
Analytic Inverse Kinematics
4
Analytic Inverse Kinematics
5
Inverse Kinematics - Numerically
w2
d2
End Effector
q2
w2 x d2
- Compute instantaneous effect of each joint
- Linear approximation to curvilinear motion
- Find linear combination to take end effector
towards goal position
6
Inverse Kinematics
7
Inverse Kinematics
Solution only valid for an instantaneous step
Angular affect is really curved, not straight
line
Once a step is taken, need to recompute solution
8
Inverse Kinematics - Mathematics
9
Matrix Form
Y F(X)
10
The Matrices
11
The Instantaneous Affect
w2
d2
q2
w2 x d2
12
Pseudo Inverse of the Jacobian
13
Solving using the Pseudo Inverse
LU decomposition
14
Adding a Control Term
15
Form of the Control Term
16
Some Algebraic Manipulation
17
Solving the Equations
LU decomp.
18
Control Term
Use to bias to desired mid-angle
Does not enforce joint angles
Does not address human-like or natural motion
Recommended
CrystalGraphics Presentations





























