
Apprenticeship Learning via Inverse Reinforcement Learning
Title:
Apprenticeship Learning via Inverse Reinforcement Learning
Description:
Consider modeling an autonomous RC-car's dynamics from a sequence of states and ... We build a dynamics model of the car, and find a policy/controller in simulation ... – PowerPoint PPT presentation
Number of Views:35
Avg rating:3.0/5.0
Title: Apprenticeship Learning via Inverse Reinforcement Learning
1
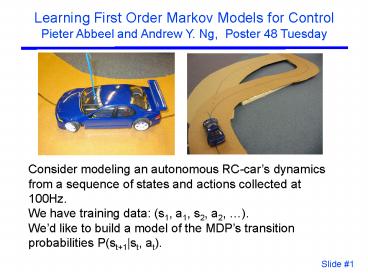
Learning First Order Markov Models for
ControlPieter Abbeel and Andrew Y. Ng, Poster
48 Tuesday
Consider modeling an autonomous RC-cars dynamics
from a sequence of states and actions collected
at 100Hz. We have training data (s1, a1, s2, a2,
). Wed like to build a model of the MDPs
transition probabilities P(st1st, at).
Slide 1
2
Learning First Order Markov Models for
ControlPieter Abbeel and Andrew Y. Ng, Poster
48 Tuesday
- If we use maximum likelihood (ML) to fit the
parameters of the MDP, then we are constrained to
fit only the 1-step transitions - max? ?t p(st1 st, at)
- But in RL, our goal is to maximize the long-term
rewards, so we arent really interested in the
1/100th-second dynamics. - The dynamics on longer time-scales are often
only poorly approximated (assuming the system
isnt really first-order). - Algorithms for building models that better
capture dynamics on longer time-scales. - Experiments on autonomous RC car driving.
Slide 2
3
Learning First Order Markov Models for Control
- Pieter Abbeel and Andrew Y. Ng
- Stanford University
4
Autonomous RC Car
5
Motivation
- Consider modeling an RC-cars dynamics from a
sequence of states and actions collected at
100Hz. - Maximum likelihood fitting of a first order
Markov model constrains the model to fit only the
1-step transitions. However for control
applications, we do not care only about the
dynamics on the time-scale of 1/100 of a second,
but also about longer time-scales.
6
Motivation
- If we use maximum likelihood (ML) to fit the
parameters of a first-order Markov model, then we
are constrained to fit only the 1-step
transitions. - The dynamics on longer time-scales are often
only poorly approximated unless the system
dynamics are really first-order. - However for control interested in maximizing
the long-term expected rewards.
7
Random Walk Example
- Random walk.
- Consider two cases
- Increments ?i independent Var(ST) T.
- Increments ?i perfectly correlated
Var(ST) T2.
Regardless of true model, ML will return
same model with .
8
Examples of physical systems
- Influence of wind disturbances on helicopter
- Very small over one time step.
- Strong correlations lead to substantial effect
over time.
- Systematic model errors can show up as
correlated noise. E.g., oversteering or
understeering of car.
- First order ML model may overestimate ability to
control helicopter and car thinking variance is
O(T) rather than O(T2). This leads to danger
of, e.g., flying too close to a building, or
driving on too narrow a road.
9
Problem statement
- The learning problem
- Given state/action sequence data from a system.
- Goal model the system for purposes of control
(such as to use with a RL algorithm). - Even when dynamics are not governed by an MDP, we
often would still like to model it as such
(rather than as a POMDP), since MDPs are much
easier to solve. - How do we learn an accurate first order Markov
model from data for control? - Our ideas are also applicable to higher
order, and/or more structured models such as
dynamic Bayesian networks and mixed memory Markov
models.
10
Preliminaries and Notation
- Finite-state decision process (DP)
- S set of states,
- A set of actions,
- P set of state transition probabilities
-
not Markov! - ? discount factor,
- D initial state distribution,
- R reward function, 8 s R(s) Rmax .
- We will fit a model ,
with estimates of the transition probabilities
.
- Value of state s0 in
under policy ?
11
Parameter estimation when no actions
- Consider
Where
is the variational distance.
- dvar is hard to optimize from samples, but can be
upper-bounded by a function of KL-divergence. - Minimizing KL-divergence is, in turn, identical
to minimizing log-loss.
12
dvar?KL?log-likelihood
The last step reflects we are equally interested
in every state as possible starting state s0.
13
The resulting lagged objective
- Given a training sequence s0T, we propose to use
- Compare this to the maximum likelihood objective
14
Lagged objective vs. ML
- Consider a length four training sequence, which
could have various dependencies.
- ML takes into account only the following
transitions
- Our lagged objective also takes into account
S1
S2
S2
S1
Yellow nodes are observed, white nodes are
unobserved.
15
EM-algorithm to optimize lagged objective
- E-step compute expected counts
- and store in stats. I.e., 8 t, k, l, i,
j
- M-step update such that
16
Computational Savings for E-step
- Inference for E-step can be done using standard
forward and backward message passing. For every
pair (t, tk), the forward messages at position
ti depend on t only, not on k. So, computation
of different terms in the inner-summation can
share messages. Similarly for backward messages.
This reduces the number of message computations
by a factor T. - Often only interested in some maximum horizon H.
I.e., in the inner-summation of the objective
only consider k1,,H. - Reduction from O(T3) to O(T H2).
- More substantial savings (Sti, Stkj) and
(Sti, Stkj) contribute same to stats( . , .
) - Computing stats( . , . ) contribution for all
such pairs only once. - Further reduction to O(S2 H2).
17
Incorporating actions
- If actions are incorporated, our objective
becomes
- The EM-algorithm is trivially extended by
conditioning - on the actions during the E-step.
- Forward messages need to be computed only once
for - every t, backward messages once for every tk.
as before
- Number of possibilities for attk-1 is
O(Ak). - Use only a few deterministic exploration
policies. - ? Can still obtain same computational savings as
before.
18
Experiment 1 shortest vs. safest path
- Actions are 4 compass directions.
- Move in intended direction with probability 0.7,
and a random direction with probability 0.3. - The directions of the random transitions are
dependent, and correlated over time. A parameter
q controls the correlation between the directions
of the random transitions on different time steps
(uncorrelated if q0, perfectly correlated if
q1). - We will fit a first order Markov model to these
dynamics (with each grid position being a state).
Details Noise process governed by a Markov
process (not directly observable by the agent)
with each of the 4 directions as states, with
Prob(staying in same state) q.
19
Experiment 1 shortest vs. safest path
(q)
If the noise is strongly correlated across time
(large q), our model estimates the dynamics to
have a higher effective noise level. As a
consequence the more cautious policy (path B) is
used.
Details Learning was done using a 200,000
length state-action sequence. Reported results
are averages over 5 independent trials. The
exploration policy used independent random
actions at each time step.
20
Experiment 2 Queue
Customers arrive over time to be served. At
every time, the arrival probability equals p.
Service rate probability that the customer
first in queue gets serviced successfully in the
current time step.
Actions 3 service rates, with faster service
rates being more expensive. q0 0
reward 0 q1 p reward -1 q2 .75
reward -10 Queue buffer length 20 buffer
overflow results in reward -1000.
21
Experiment 2 Queue
- Underlying (unobserved!) arrival process has 2
different modes (fast arrivals and slow arrivals)
P( arrival slow mode ) 0.01 P( arrival fast
mode ) 0.99 Steady state P(slow mode)0.8,
P(fast mode)0.2
Additional parameter determines how rapidly
system changes between fast and slow modes.
Slow switching
between modes
Fast switching
between modes
22
Experiment 2 Queue
- Estimate/Learn first order Markov model with
- State size of the queue, Actions 3 service
rates - Exploration policy repeatedly use same service
rate for 25 time-steps. We used 8000 such trials.
15 better performance at high correlation levels.
Same performance at low correlation levels.
23
Experiment 3 RC-car
- Consider the situation where the RC-car can
choose between 2 paths - A curvy path with high reward if successful in
reaching the goal. - An easier path with lower reward if successful
in reaching the goal - We build a dynamics model of the car, and find a
policy/controller in simulation for following
each of the paths. The decision about which path
to follow is then made based upon this
simulation.
24
RC-car model
- ? angular direction the RC-car is headed
- ? angular velocity
- V velocity of the RC-car (kept constant)
- ut steering input to the car ( 2 -1,1)
- C1, C2, C3 parameters of the model, estimated
using linear regression - wt noise term, zero-mean Gaussian with
variance ?2
.
Using the lagged objective, we re-estimate the
variance ?2, and compare its performance to the
first-order estimate of ?2.
25
Controller
- We use the following controller
- desired steering angle p1(y-ydes)
p2(?-?des) - u f(desired steering angle)
- We optimize over the parameters p1, p2 to follow
the straight line y0, for which we set ydes0,
?des0. - For the specific two trajectories, ydes(x),
?des(x) are optimized as a function of the
current x position. - For localization, we use an overhead camera.
26
Simulated performance on curvy trajectory
Plot shows 100 sample runs in simulation under
the ML-model. The ML-model predicts the RC-car
can follow the curvy road gt95 of the time.
Plot shows 10 sample runs in simulation under the
lag-learned model. The lag-learned model predicts
the RC-car can follow the curvy road lt 10 of the
time.
Green lines simulated trajectories, Black lines
road boundaries.
27
Simulated performance on easier trajectory
Plot shows 100 sample runs in simulation under
the lag-learned model. The lag-learned model
predicts the RC-car can follow the curvy road gt
70 of the time.
Plot shows 100 sample runs in simulation under
the ML-model. The ML-model predicts the RC-car
can follow the easier road gt99 of the time.
? ML would choose the curvy road if high reward
along curvy road.
Green lines simulated trajectories, Black lines
road boundaries.
28
Actual performance on easier trajectory
The real RC-car succeeded on the easier road
20/20 times.
The real RC-car failed on the curvy road 19/20
times.
Movies available.
29
RC-car movie
30
Conclusions
- Maximum likelihood with a first order Markov
model only tries to model the 1-step transition
dynamics. - For many control applications, we desire an
accurate model of the dynamics on longer
time-scales. - We showed that, by using an objective that takes
into account the longer time scales, in many
cases a better dynamical model (and a better
controller) is obtained.
Special thanks to Mark Woodward, Dave Dostal,
Vikash Gilja and Sebastian Thrun.
31
Cut out slides follow
32
Lagged objective vs. ML
- Consider a length four training sequence, which
could have various dependencies.
- ML takes into account only the following
transitions.
- Our lagged objective also takes into account
Shaded nodes are observed, white nodes are
unobserved.
33
Experiment 2 Queue use this one or previous
one?
Queue size at time t1
Queue size at time t
unsuccessful servicing
s(t1) s(t)1
arrival
successful servicing
s(t)
s(t1) s(t)
unsuccessful servicing
no arrival
s(t1) s(t)-1
successful servicing
Arrival probability p
Choice of actions between 3 service rates q0 0
reward 0 q1 p reward -1 q2
.75 reward -10 Buffer size 20. Buffer
overflow results in reward of -1000.
34
Actual performance on curvy trajectory
Real trajectories obtained as obtained on floor.
The actual RC-car fell off the curvy trajectory
19/20 times.
Movies available.
Green lines simulated trajectories, Black lines
road boundaries.
35
Alternative title slides follow
36
Learning First Order Markov Models for Control
- Pieter Abbeel and Andrew Y. Ng
- Stanford University
37
Learning First
38
Order Markov
39
Models for
40
Control
41
- Pieter Abbeel and Andrew Y. Ng
- Stanford University
42
- Pieter Abbeel and Andrew Y. Ng
- Stanford University
Recommended
CrystalGraphics Presentations





























