
Layered file IO 1 - PowerPoint PPT Presentation
1 / 38
Title: Layered file IO 1
1
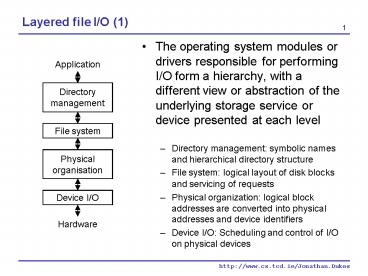
Layered file I/O (1)
- The operating system modules or drivers
responsible for performing I/O form a hierarchy,
with a different view or abstraction of the
underlying storage service or device presented at
each level - Directory management symbolic names and
hierarchical directory structure - File system logical layout of disk blocks and
servicing of requests - Physical organization logical block addresses
are converted into physical addresses and device
identifiers - Device I/O Scheduling and control of I/O on
physical devices
Application
Directory management
File system
Physical organisation
Device I/O
Hardware
2
Layered file I/O (2)
- Layers can be added or substituted to add
functionality - As long as the layers adhere to interfaces
- Example Software RAID
- We can implement a single logical volume on
multiple disks to improve performance and/or
reliability - A software RAID layer presents the same logical
volume abstraction to the file system layer above - Logical block addresses at the software RAID
level are translated into logical addresses of
blocks within a partition on a disk device - The request is serviced as before at the physical
organisation and device I/O levels
Application
Directory management
File system
Software RAID
Physical organisation
Device I/O
Hardware
3
Disk access
- Disks are s l l o o o w w w w
- We need ways to improve the performance of disk
I/O - Caching is one possibility, but this still
doesnt help us on the occasions when device I/O
needs to be performed - How can the operating system improve disk I/O
performance? - Aside Disk I/O delays
- seek time the head must be positioned at the
correct track on the platter - rotational delay the transfer cannot begin until
the required sector is below the head (sometimes
expressed at latency) - data transfer the read or write operation is
performed - Average access time
seek
transfer
latency
4
Access time example
- Suppose we have a disk with these characteristics
- Rotational speed 7,200 RPM (latency 4.17ms)
- Average seek time 8.5 ms
- 512-byte sectors
- 320 sectors per track
- Using these average delays, how long does it take
to read 2560 sectors from a file? - Time to read one sector 8.5 4.17 0.0261
12.6961 ms - Time to read 2560 sectors 32.5 seconds (thats
slow) - However, if we assume the file is contiguous on
disk - and occupies exactly 8 tracks
- Time to seek to first track 8.5 ms
- Time to read track 4.17 ms 8.34 ms
- Suppose seek time between tracks is 1.2 ms
- Total read time 8.5 4.17 8.34 7 x (1.2
4.17 8.34) 117 ms
5
Inside a DISK
Disk Hardware..
6
Time for disk operations.
- 3 components of data access time. Today, latency
time and seek time are comparable. This means
optimization algorithm more complex.
7
Disk scheduling
- So, the order in which sectors are read has a
significant influence on I/O performance - Most file systems will try to arrange files on
disk so large portions of the file are contiguous - Below the file system level, even if files are
not contiguous, the operating system or disk
device driver can try to order operations so seek
times are minimised - Disk scheduling algorithms
- When a process needs to perform disk I/O, a
request is issued to the operating systems I/O
manager - The operating system creates a descriptor for the
operation - If there are no other pending requests (from the
same or other processes) then the request can be
scheduled immediately and performance is not an
issue - If multiple disk accesses are queued up at the
same time, the OS can improve I/O bandwidth
and/or latency through sensible ordering of the
queued I/O operations
8
Disk scheduling algorithms (1)
- FCFS scheduling
- The I/O request queue is follows the FIFO queuing
discipline - Requests are serviced in the order in which they
were submitted to the operating systems I/O
manager - Although the algorithm is fair, the distribution
of requests across the disk means a significant
proportion of the disk access time is spent
seeking - SSTF scheduling
- Shortest seek time first
- Of the queued requests, select the one that is
closest to the current disk head position (the
position of the last disk access) - Reduces time spent seeking
- Problem Some requests may be starved
- Problem The algorithm is still not optimal
9
First Come First Server
Requests served as they arrive in the queue. If S
is the number of Sector and N the length of the
queue, the average movement of the disks head is
less than S/2 (about S/3)
10
Shortest Seek Time First
- The disks head read the waiting queue and serves
the request closest to the its present position
11
Disk scheduling algorithms (2)
- SCAN scheduling
- Starting from either the hub or the outer edge of
the disk and moving to the other edge, service
all the queued requests along the way - When the other edge is reached, reverse the
direction of head movement and service the queued
requests in the opposite direction - If a requests arrives in the queue just before
the head reaches the requested track, the request
will be serviced quickly - However, if a requests in the queue just after
the head has serviced the requested position, the
request may take a long time to be serviced
(depending on the current head position) - Consider a request for a track at the hub that
arrives just after the hub has been serviced - That request will not be serviced until the head
has serviced the requests in both directions
12
Scan Scheduling
- The disks head starts from position 63 and goes
left until it reaches the inner track, then it
changes direction
13
Disk scheduling algorithms (3)
- C-SCAN scheduling
- Circular-SCAN scheduling
- Similar to SCAN, but the worst case service time
is reduced - Like SCAN, the head moves in one direction
servicing requests along the way - However, unlike SCAN, instead of servicing
requests in the opposite direction, the head is
returned immediately to the opposite edge and
starts servicing requests again in the same
direction - SCAN and C-SCAN continuously move the head from
one extreme of the disk to the other - In practice, if there are no further requests in
the current direction, the head reverses its
direction immediately - These modifications are referred to as the LOOK
and C-LOOK scheduling algorithms
14
Circular Scan
- Variance of response time less than SCAN
- More execution overhead than SCAN (when the head
reaches the inner track, it goes directly to the
outer track without serving any request.
15
Look strategy
- The elevator strategy
- It doesnt go till the end of the platter if it
is not necessary - LOOK, C-LOOK
16
Fscan e N-Step Scan
- To avoid indefinitely postponing requests.
- Fscan accepts request only when the sweep begins.
- N-Scan accepts only n request using SCAN algorithm
17
COMPARISON
18
Performance Indicators
- Total length of the disk head movements
- Variance of the response time (Is it a fair
algorithm? Is there the possibility of
indefinitely postponing requests?) - EXAMPLE
- 10 Tracks (0-9)
- Initial Position is 3
- Queue dimension 4 requests
- 6 Requests to be served. A request enters the
queue as soon as one requested in the queue is
served - Compare FCFS and SSTF
19
Example (2)
- Data in the queue are 1(1),8(2),3(3),7(4)
- Data waiting to enter the queue are 9(5),4(6)
- In brackets is the order of arrival of each
request. - FCFS Sequence (same as the order)
- 3 ? 1(1),8(2),3(3),7(4), 9(5),4(6)
- Total movement (sum of the difference)
275425 25 - Variance of response time 0 (obviously)
- SSTF Sequence
- 3 ? 3(3),1(1),4(6),7(4), 8(2),9(5)
- Attention! 4(6) enters the queue when 1(1) has
been served! - Total movement (sum of the difference)
023311 10 - Variance of response time 1.46 (average 1.6).
For example, request 8(2) is served as 5th
request.
20
What about Rotational Optimization?
- Which request should I serve before considering
ALSO latency time (due to rotation)? - Needed today latency time and seek time are
comparable! - SPTF Shortest positioning Time First
- SAFT Shortest Access Time First
- Positioning Time Seek Time Latency Time
- Access Time Positioning Time Transmission
Time - SAFT better performance but indefinitely
postponement
21
RAID Reduntant Array of Independent Disks
- Redundant Array of Independent Disk
- Raid is a way of organizing logical volume over
more than one physical disk to increase - Performance
- Reliability and Fault Tolerance
- Basic techniques
- Redundancy
- Data Striping (Strips and Stripe)
- Raid Controller (HW, dedicated Proc)
- Rationale
- Disk Unit costs is decreasing
- Mission Critical Systems
Application
Directory management
File system
Software RAID
Physical organisation
Device I/O
Hardware
22
RAID 0 Simple Striping
- Logical Volumes blocks spread over disks. Two
contiguous blocks on separate disks. - Granularity of stripes
- Fine- grained strips (small block size, many
disks used for big size file) - Coarse-grained strips (strip bigger. Generally
files distributed over less disks. Waste of
performance and space for small files) - Storage Efficiency all the space used for data
(no redundancy) but.. - Redundancy NOT present (not a real RAID system).
No Fault tolerance - Performance
- Reading n times faster (ideally) than single
disk - Writing n times faster (ideally). Ex K can be
written while reading A and B. - Very good if sequential
- Cost the lowest of all RAID
23
RAID 1 Mirroring
- Each logical volume block has a copy on 1 or n
disks. - Storage Efficiency Only 1/N storage space is
used. (In case of a mirrored pair, 50 wasted) - Complete Redundancy
- Fault tolerant. If mean-time-to-failure (MTTF) is
T, the mirrored systems (n copies) will have a
MTTF of 1/Tn - Spare disk hot swappable
- High Costs. High Availability.
- Performance
- Writing slower average to the same mirror couple
(wait the slower one). But better than others - Reading improved, (read the fastest disk).
Response time decreases by 33
24
RAID 2 Bit level Striping Hamming ECC code
- Striping at bit level. Every stripe has control
bits some disks used only for storing control
bits - Hamming Code for parity if data are n bit long,
int(1log2(n 1)) control bits required. It
corrects 1 error, it detects 2 error (but it
cant correct). - Storage efficiency low. It depends on the disk
number. With 4 data disks 3 control disks.
Efficiency is 57 (4/7). For 10 disks 4 control
disk, efficiency is 71. - Fault Tolerance 2 disks can break. On the fly
correction of a single error
Performance Writing quite bad. Control bits must
be computed for every stripe and written. Even if
part of the stripe is written (in that case all
the stripe must be read before writing) Reading
read data, compute ECC, read ECC and
compare Division in subgroups can help
performance. Cost high. Not used because often
implemented by single disks.
25
RAID 3 Bit/Byte Level XOR ECC Parity
- Like RAID 2 but it uses only one control bit. It
detects one error, no on the fly correction. - Parity bit is 0 for even number of 1 in the data,
1 for an odd number of 1. It uses nested XOR for
parity bit calculation (try it!). - Storage efficiency only 1 disk used for control.
So, (N-1)/N. with N10 90 - Fault Tolerance one disk failure (what we
need..). - Performance. Still writing overheadstill it has
to compute parity and read all the stripe. - Cost hardware controller required.
26
RAID 4 Block Level XOR ECC Parity
- Like RAID 3 but is uses blocks instead of byte.
Coarse-grained striping. Better performance in
reading (especially random). - Storage efficiency only 1 disk used for control.
So, (N-1)/N. with N10 90 - Fault Tolerance one disk failure (what we
need..). - Performance. Multiple reading more likely
(coarse-grained). Still there is writing
overhead No need to read all the blocks of the
stripe (not like bit or byte level striping) but
parallel writing is still not possible (parity
disk must be updated!). - Cost hardware controller required.
27
RAID 5 Block Level XOR ECC striped
- The most popular. Parity blocks are striped as
well. Removes the bottleneck on the parity disk! - Storage efficiency like RAID 3,4. Fault Tolerance
like RAID 2,3,4 - Performance. Writing is improved if parity disks
are different. Again, all the stripe must be read
to compute parity. - AFRAID techniques (parity computed every X ms
instead of every time) - Cost fair
28
RAID 6 RAID 5 1 parity disk more
- Just more fault tolerance but less storage
efficiency (two parity disks) - A proprietary RAID, thus not open
- Used seldom
29
RAID 10 conbination of RAID
- Mirrored pair of striped disks.
- Very Popular
- Low Storage Efficiency (50)
- Good performance
- High Cost
30
Comparison of different RAID
31
File I/O buffering (1)
- A process invokes an operating system service to
write some data to a file - handle identifies the open instance of the file
(assumes we have already opened the file) - data points to the location in memory containing
the data to be written - start is the starting offset in the file
- length is the amount of data to write
- The data isnt written to disk immediately
- The OS will decide when to schedule the I/O
operation for efficiency - What happens if the process modifies the data
before the I/O operation takes place? - What happens if the page(s) containing the buffer
are paged out?
write(handle, start, length, data)
32
File I/O buffering (2)
- Buffering solves this problem
- When the system service is invoked to write the
data to a file, the kernel allocates a buffer for
the operation and copies the data to the buffer - The process is now free to modify the data,
without effecting the original write operation - Once the buffers contents have been written to
disk, the memory allocated to the buffer can be
freed or the buffer can be reused for another I/O
operation - File I/O caching is distinct from buffering
- but the two functions are often combined
- The I/O buffers allocated by the kernel can be
used as a cache to reduce the number of slow disk
I/O operations - I/O requests are directed to the buffered copy of
the data, if it exists, otherwise a new buffer is
allocated and the data is read/written - Consider a second process reading the data
written by the first
33
Example UNIX buffer cache
- Kernel allocates space for a number of buffers
- Buffers consist of a buffer header and data area
large enough to store the contents of an entire
disk block - There is a one-to-one mapping from headers to
data areas - We obviously cant have one buffer for every
block on disk, so the kernel will try to make use
of the limited buffers available - Thus, the mapping from buffers to disk blocks
will change over time - Disk blocks cannot map into more than one buffer
(why?) - Buffer header
device number
block number
status
data area
next buffer on hash queue
prev. on hash queue
next free buffer
prev. free buffer
34
Example UNIX buffer cache
- The kernel uses two data structures to manage
buffers - Free list
- A circular doubly linked list of free buffers
- Maintains least-recently-used order for buffers
- Initially, every buffer is on the free list
- If a buffer on the free list contains a block we
are looking for, we remove it from the list - Otherwise, we remove the buffer from the head of
the list and replace its contents with the block
from disk - When a buffer is released, it is placed at the
tail of the free list - Buffers are marked busy when they are removed
from the free list - Buffers are busy for the duration of the I/O
operation (read / write) - What happens if a process tries to access a busy
block?
free list head
84
27
85
42
19
35
Example UNIX buffer cache
- Hash Queues
- To search for a disk block in the buffer pool,
the kernel may need to examine every buffer
header in the buffer cache - This could be a slow process
- Instead of searching every header, buffers are
arranged on hash queues - The hash is a function of the device and block
numbers - Each hash queue is a circular double linked list
- The number of buffers on each hash queue may vary
(why?) - A block may be on a hash queue and on the free
list at the same time
36
Example UNIX buffer cache
- Five scenarios may occur when allocating a buffer
for a disk block - The block is found in the hash queue and it is
free - The block is not found on the hash queue so a new
block is allocated - The block is not found on the hash queue, but the
block at the head of the free list is marked
delayed write - The block is not in the hash queue and the free
list is empty - The block is found on the hash queue, but it is
marked busy
37
Example Windows XP caching
- Windows XP Caching overview
- Caching is based on files, rather than blocks and
is tightly integrated with the VM manager - The top 2GB of every process VM space comprises
the system area and is available in the context
of all processes - The cache manager maps files into part of this
2GB space - Up to one half of the space can be used for this
purpose - The VM handles file I/O
- The cache area is divided into 256K blocks
- Files are mapped into the cache in 256K blocks
- Each cache block is described by a
virtual-address control block (VACB) - Virtual address and file offset
- All VACBs in the system are maintained in a
single array - Each open file has a VACB index array containing
the indices of those VACBs for in-cache blocks of
the file, or null for non-cached blocks - The size of the system-wide cache can grow or
shrink dynamically
38
Example Windows XP caching
- Handling I/O requests
- The I/O request is described by I/O Request
Packet (IRP) a block of data that contains the
parameters for the I/O request - The IRP is passed to the file system driver by
the I/O request manager - The file system driver asks the cache manager to
locate the requested part of the file in the
cache - The cache manager translates the file offset into
an offset into the VACB array for the file - If the array entry is invalid (NULL), the cache
manager allocates an unused cache block to the
file and updates the VACB index array for the
file - The cache manager copies the requested data to
the callers buffer (or vice versa if the request
is a write) - The copy may fail because of a page fault, in
which case the requested portion of the file will
be paged in
Recommended
CrystalGraphics Presentations





























