
Graphplan PowerPoint PPT Presentations
All Time
Recommended

Input list of added and deleted facts at time i. ... Add new facts and new satisfied operators to graph. ... happens since adding facts means checking each ...
| PowerPoint PPT presentation | free to view

Construct a graph that encodes constraints on possible plans ... Constructing the planning graph. Level P1: all literals from the initial state ...
| PowerPoint PPT presentation | free to download

The Graphplan Planner Searching the Planning Graph Literature Malik Ghallab, Dana Nau, and Paolo Traverso. Automated Planning Theory and Practice, chapter 6.
| PowerPoint PPT presentation | free to download

Every node in search space is a set of several partial plans. So not every action in a node appears in the solution ... This blows up into O(kd) nodes where ...
| PowerPoint PPT presentation | free to download

Construct a graph that encodes constraints on possible plans ... Props. Time 3. Actions. Time 3. Goals. at A L. at B L. at R L. fuel R. load A L. load B L. move L P ...
| PowerPoint PPT presentation | free to download
From SGP to TGP. TGP Graph Expansion. TGP Solution Extraction. Experiments. 3. Graphplan ... Effects occur at end (s d) Preconditions hold throughout. A. eff1 ...
| PowerPoint PPT presentation | free to view

Graphplan: Fast Planning through Planning Graph Analysis Avrim Blum Merrick Furst Carnegie Mellon University
| PowerPoint PPT presentation | free to download

... {At(Car, LC),Has-fuel(Car)} STRIPS ... uses mutexes of planning Graph to guide the search. ... of mutexes to direct the search for a plan. generate a ...
| PowerPoint PPT presentation | free to download

loc-from AIRPORT) ( loc-to AIRPORT)) (preconds (at airplane loc-from )) (effects ... Different operator parameters should create different delays ...
| PowerPoint PPT presentation | free to view

Clearly Graphplan-based encodings are better than backward-proof based encodings ... TALPlan [Kvarnstrom & Doherty, 2000] Customization frameworks ...
| PowerPoint PPT presentation | free to download

Maps all possible initial states to the appropriate actions. State explosion problem ... RSCC = Ri. Similar to the Graphplan mutual exclusion rule. Interference: ...
| PowerPoint PPT presentation | free to download

Life must be lived forward, but can only be understood ... EBL based memos can be seen as unearthing hard mutexes (of all orders) Graphplan and Optimality ...
| PowerPoint PPT presentation | free to download

GamePlan: AN ADVERSARIAL PLANER IN MULTI-AGENT SYSTEM (A Preliminary Report) Wenjin Lue and Kostas Stathis City University, London Dagstuhl, 26th November, 2002
| PowerPoint PPT presentation | free to download

Compact (Crawford & Auton 1996) ... solver compact -l -then satz -cutoff 25 -restart 10. Converting graph to wff. 6151 variables ...
| PowerPoint PPT presentation | free to download

1. BLACKBOX: A New Approach to the Application of Theorem Proving to ... compare with Medic (Weld 1997), which translated STRIPS CNF directly. Act1. Act2. Fact ...
| PowerPoint PPT presentation | free to download

A non-linear, partial-order planer using forward construction and backward path ... Russel Stuart & Norvig Peter, Artificial Intelligence A Modern Approach, ...
| PowerPoint PPT presentation | free to view

M12O: B11 X11 B12 O12. M13O: B11 X11 B13 O13. M23O: B11 X11 B23 O23. M31O: B11 X11 B31 O31 ... M12O: B33 X33 B12 O12. M13O: B33 X33 B13 O13. M23O: B33 X33 B23 ...
| PowerPoint PPT presentation | free to download

Title: 573 lecture 21 - planning continued Author: Henry Kautz Last modified by: Henry Kautz Created Date: 6/5/1997 6:05:21 PM Document presentation format
| PowerPoint PPT presentation | free to download

Currently, CSP people are trying to copy over the ideas from CHAFF to CSP. ... Davis Putnam ( Satz; RelSat; Chaff) Gsat. Direct vs. compiled solution extraction ...
| PowerPoint PPT presentation | free to download

A disjunctive formula is a collection of one or more (positive and negative) ... eliminates in one shot all that can be eliminated and returns a smaller formula. ...
| PowerPoint PPT presentation | free to download

Trucks, Cranes, Locations. Counting argument. Clique decomposition ... Trucks of various capacities (small - 1 box, big - 2 boxes) Experiments: Refueling planes ...
| PowerPoint PPT presentation | free to view

Some s are taken from presentations by Kautz and Selman. Please visit ... Replaces: drive(truck1 LA SF 5) With: (drive-arg1(truck1 5) ^ drive-arg2(LA 5) ...
| PowerPoint PPT presentation | free to download

GP-HSP (AIPS 2000) Variable/Value ordering heuristics based on distances. Partial order planning ... GP-HSP (AIPS 2000); PEGG (IJCAI 2003; AAAI 1999] ...
| PowerPoint PPT presentation | free to download
3/25: Leaving STRIPS Planning and going to Sapa
| PowerPoint PPT presentation | free to download

Interference: one of the effects of one action is the negation of a precondition ... Competing needs: one of the preconditions of one action is mutually exclusive ...
| PowerPoint PPT presentation | free to view

Solves the PSP problem by encoding it as an integer program. Altaltps ... Solves the PSP problem through a goal selection heuristic. Sapaps ...
| PowerPoint PPT presentation | free to download

Putting Plans to Real Use Intelligent Systems for Planning, Execution and Collaboration Planning - Key task - List of important and varied applications
| PowerPoint PPT presentation | free to download

Improvement in tire-world domain (with complex interactions) ... Still admissible, more informative than hmax, still cheap. Room for domain-dependent options? ...
| PowerPoint PPT presentation | free to download
Metric-Temporal Planning: Issues and Representation. Search ... (belief) state action tables. Deterministic Success: Must reach goal-state with probability 1 ...
| PowerPoint PPT presentation | free to download

relsat (Bayardo) - dependency directed backtracking: add new clauses ... C-MAXPLAN, ZANDER (Littman & Majercik 1999) Probabilistic planning via stochastic SAT ...
| PowerPoint PPT presentation | free to view

Many planning problems have a time-dependent component. actions happen over time ... TGP action model. STRIPS actions, plus start time, end time, duration ...
| PowerPoint PPT presentation | free to download

HSP 1.0: approximate h by weight value sums ... Benches. Measured (amongst other things): maximal exit distance. h Topology in Small Instances ...
| PowerPoint PPT presentation | free to download

Both the AI and CADE/CAV communities have long been concerned with reasoning ... 'Classic' work in AI has concentrated on STRIPS style planning ('state space' ...
| PowerPoint PPT presentation | free to view

Scalable Knowledge Representation and Reasoning Systems Henry Kautz AT&T Shannon Laboratories Introduction In recent years, we've seen substantial progress in scaling ...
| PowerPoint PPT presentation | free to view
Artificial Intelligence 1: planning Lecturer: Tom Lenaerts Institut de Recherches Interdisciplinaires et de D veloppements en Intelligence Artificielle (IRIDIA)
| PowerPoint PPT presentation | free to download
Flexible Reasoning with Functional Models J. William Murdock Intelligent Decision Aids Group Navy Center for Applied Research in Artificial Intelligence
| PowerPoint PPT presentation | free to download
We will define the formula for (P,n) such that: ... The formulas say nothing about what happens to facts if they are not effected by ...
| PowerPoint PPT presentation | free to download

A: A Unified Brand-name-Free Introduction to Planning. Subbarao ... De-clobbering: Force intervening steps to. preserve the condition. Book-keeping: (Optional) ...
| PowerPoint PPT presentation | free to download

U((P1(a),J(a)),(P1(x),J(x)) s = {x = a} consistent with x=z. S5.s Init. S1. S2. S3. S4 ... Compilation stage can be time consuming, leads to memory blow-up ...
| PowerPoint PPT presentation | free to download

No delete lists: NEXP. operators only need to appear once ... No negative preconds and no deletes: EXP ... No deletes: from NEXP to NP. No deletes and no ...
| PowerPoint PPT presentation | free to download
Title: Introduction to Planning Author: Han Yu Last modified by: Rob Traub Created Date: 9/1/2002 9:29:18 PM Document presentation format: On-screen Show
| PowerPoint PPT presentation | free to download

Artificial Intelligence What is AI? Can machines think ? Can machines be truly autonomous? Can machines program themselves? Can machines learn?
| PowerPoint PPT presentation | free to download

Title: 6. Wissensbasiertes Planen Author: Brewka Last modified by: brewka Created Date: 10/29/2001 4:13:16 PM Document presentation format: Benutzerdefiniert
| PowerPoint PPT presentation | free to download

Planning as Logic: Why logic? Flexible language Range of expressive power/tractability Clear semantics and syntax Good solution processes Mature (older than computer ...
| PowerPoint PPT presentation | free to download
(have banjo)) ((swap banjo kiwi))) Preconds. Delete-effects. Add-effects ... (have banjo)) ((swap banjo kiwi))) State: (have banjo) (defdomain basic-example ...
| PowerPoint PPT presentation | free to download
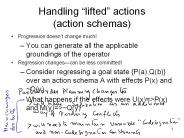
Regression changes can be less committed! ... De-clobbering: Force intervening steps to. preserve the condition. Book-keeping: (Optional) ...
| PowerPoint PPT presentation | free to download

Problem 1: Do not handle uncertain action effects ... Domains: Logistics, 10x10 Grid, Slippery Gripper, Sand-Castle-67. 6/8/2006. ICAPS'06 McLUG ...
| PowerPoint PPT presentation | free to view

Automated Planning: Theory and Practice Review for the Final Exam Dana S. Nau University of Maryland * *
| PowerPoint PPT presentation | free to download
1. Modeling and Solving Planning Problems as ... ORL. NYC. 38. Pruning the Planning Graph. Category I Rules. Facts. Facts. Actions. Facts. Facts ... ORL. NYC ...
| PowerPoint PPT presentation | free to download

20 (donate l2 l0 f2 f1 f0 f0 f1) 20 (load c0 v1 l0 s1 s0) Note Redundant actions ... (predicate vehicle-at 2) (predicate conn 2) (predicate has-fuel 2) (predicate ...
| PowerPoint PPT presentation | free to download

Or self-selection among submissions because of reputation as archival conference? ... How to exist and cooperate/compete with speciality conferences. ...
| PowerPoint PPT presentation | free to download

construct a new rule from the generalized. Utility Problem. EBL in UCPOP ... When all the branches under P are failing, we can construct an explanation for P itself ...
| PowerPoint PPT presentation | free to view

Action(PutOn(Spare,Axle) PRECOND: At(Spare,Groundp) At(Flat,Axle) ... Consists of a sequence of levels that correspond to time steps in the plan. ...
| PowerPoint PPT presentation | free to view

Dominating planning paradigm in early 1990's ... UCPOP (Penberthy & Weld 1992) Theoretically appealing, but remained inefficient despite significant research ...
| PowerPoint PPT presentation | free to download
Compile a planning problem in to a satisfiability problem (example of a ... Compiling Planning to SAT ... Compile a planning problem into a propositional ...
| PowerPoint PPT presentation | free to download

With ={p/P1,from/JFK,to/SFO} Thus the action is applicable. 6/25/09 ... (P2,SFO) Plane(P1) Plane(P2) Airport(JFK) Airport(SFO) ... Goal(At(C1,JFK) At(C2,SFO) ...
| PowerPoint PPT presentation | free to view