
Pr - PowerPoint PPT Presentation
1 / 1
Title: Pr
1
The WatER Mission in Europe how can it help
science? By Vivien ENJOLRAS(1,2), Ernesto
RODRIGUEZ(2), Paul BATES(3), Nelly MOGNARD(1,2),
Anny CAZENAVE(1,2) (1) Centre National dEtudes
Spatiales, 18, av. Edouard Belin, 31400 Toulouse,
France (2) Laboratoire dEtudes en Geophysique et
Oceanographie Spatiales, 14 av. Edouard Belin,
31400 Toulouse, France (2) Jet Propulsion
Laboratory, 4800 Oak Grove Drive, Pasadena CA
91109, United States (3) University of Bristol,
University Road, Bristol BS81SS, United
Kingdom Author to whom correspondence should be
addressed - Email vivien.enjolras_at_gmail.com
WatER Orbit over Europe
Abstract
WatER Main Parameters
The Water Elevation Recovery (WatER) mission,
which was recently submitted by an international
team to the Earth Explorer Core Mission of ESA,
is dedicated to the determination of surface
water extent, height, and slope. The WatER
instrument consists of a Ka band Radar
Interferometer (KaRIN) coupled with a nadir Ka
altimeter (AltiKa) for filling the nadir gap and
for risk reduction in the KaRIN calibration.
There is a strong need to determine the value
added science that can be attained from various
spatial and temporal samplings of surface water
storage and movement. A Virtual Mission has been
implemented for a while and helps to answer this
question. Recent large floods that occurred in
1995 on the river Meuse in Northern Western
Europe have led to heightened interest in flood
forecasting systems in this region. The VM
concept has been applied to this river. Simulated
WatER data have been generated and ground
processing techniques have been tested in some
specific cases. Flood forecasting improvement by
assimilating generated WatER data in models is
currently under study. Keywords interferometry,
hydrology, Europe
- Main instrument Ka-band radar interferometer on
Prima platform - Two 50 km swaths on either side of the nadir
track - Spatial resolution varying continuously from 70
m x 5 m (near range) to 10 m x 5 m (far range). - First product amplitude maps of the
co-registered returns - Identification of Water Bodies
- Second Product interferometric phase map
- Estimate of the topography using timing and phase
difference measurements (relative and absolute
elevation) - Nadir gap filled with a Ka-band nadir altimeter
(AltiKa), also used in the calibration of KarIN - 6 am-6 pm Sun-Synchronous Orbit of 16 days (no
yaw steering impact and power consumption
optimization)
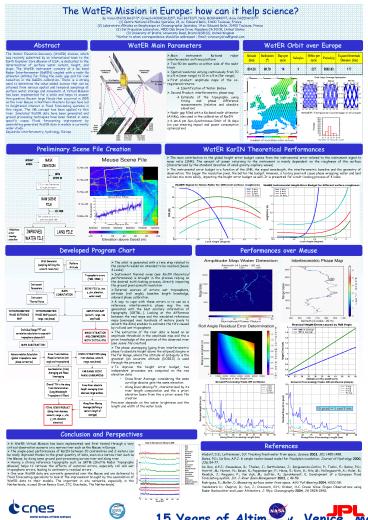
WatER KarIN Theoretical Performances
Preliminary Scene File Creation
- The main contribution to the global height error
budget comes from the instrumental error related
to the instrument signal to noise ratio (SNR).
The amount of power returning to the instrument
is mainly dependent on the roughness of the
surface (characterized by the standard deviation
of small gravity-capillary waves) - The instrumental error budget is a function of
the SNR, the signal wavelength, the
interferometric baseline and the geometry of
observation. The bigger the resolution pixel, the
better the budget. However, a too big pixel will
cause phase wrapping water and land will also
mix more easily, impacting the height error
budget as well. It is presented for a multi
looking process of 4 looks
Developed Program Chart
Performances over Meuse
- The orbit is generated with a time step related
to the azimuth resolution intended to be reached
(basis 4 Looks) - Instrument thermal noise (see KarIN theoretical
performances) is brought in the process relying
on the desired multi-looking process, directly
impacting the ground pixel azimuth resolution - External sources of errors wet troposphere,
attitude (roll angle), baseline length knowledge,
onboard phase calibration. - A way to cope with these errors is to use as a
reference interferometric phase map the one
generated with the best ancillary information of
topography (SRTM,). Looking at the difference
between the real maps and the simulated reference
maps (averaged over hundreds of meters pixels to
smooth the data) enables to estimate the tilts
caused by roll and wet troposphere - The extraction of the river data is based on an
amplitude threshold in the amplitude map and the
a priori knowledge of the position of the
observed river (see scene file creation) - The phase unwrapping (going from interferometric
phase to absolute height above the ellipsoid)
begins in the Far Range, where the altitude of
ambiguity is the greatest (an accurate altitude
(DORIS) is used through the process) - To improve the height error budget, two
independent processes are computed on the raw
elevation data - Cross River Average considering the same
curvilign absciss gets the same elevation - Along River Moving Fit, characterized by its
river length computation and the a priori
elevation basis from the a priori scene file
creation - Precision depends on the water brightness and the
length and width of the water body
Conclusion and Perspectives
References
- A WatER Virtual Mission has been implemented and
first tested through a very critical observation
scenario on a narrow river such as the Meuse in
Europe - The single-pixel performances of KarIN between
30 centimetres and 2 meters can be really
improved thanks to the great quantity of data,
even on a narrow river such as the Meuse, by
doing some ground post-processing across river
and along river - Having a strong reference topography such as
SRTM (Shuttle Radar Topography Mission) helps to
retrieve the effects of external errors,
especially roll and wet troposphere errors,
leading to centimetric residual errors - One year WatER data are currently generated over
the Meuse and are delivered to flood forecasting
specialists to look at the improvement brought by
the assimilation of WatER data to their models.
The important in situ networks, especially in the
Netherlands, is used (from Remco Dost, ITC,
Enschede, The Netherlands).
Alsdorf, D.E. Lettenmaier, D.P. Tracking fresh
water from space. Science 2003, 301, 1485-1488.
Bates, P.D. De Roo, A.P.J. A simple
raster-based model for floodplain inundation.
Journal of Hydrology 2000, 236, 54-77. De Roo,
A.P.J. Gouweleuw, B. Thielen, J. Bartholomes,
J. Bongioannini-Cerlini, P. Todini, E. Bates,
P.D. Horritt, M. Hunter, N. Beven, K.
Pappenberger, F. Heise, E. Rivin, G. Hils, M.
Hollingsworth, A. Holst, B. Kwadijk, J.
Reggiani, P. Van dijk, M. Sattler, K.
Sprokkereef, E. Development of a European flood
forecasting system. Int. J. River Basin
Management 2003, 1, 49-59. Rodriguez, E. Moller,
D. Measuring surface water from space. AGU Fall
Meeting 2004, H22C-08. Vandemark D. Chapron, B.
Sun, J. Crescenti, G.H. Graber, H.C. Ocean Wave
Slopes Observations using Radar Backscatter and
Laser Altimeters. J. Phys. Oceanography 2004, 34,
2825-2842.
15 Years of Altimetry, Venice, March 2006
Recommended
CrystalGraphics Presentations





























