
Time-Domain Representations of LTI Systems - PowerPoint PPT Presentation
Title:
Time-Domain Representations of LTI Systems
Description:
Time-Domain Representations of LTI Systems CHAPTER 2.1 Introduction Objectives: Impulse responses of LTI systems Linear constant-coefficients differential or ... – PowerPoint PPT presentation
Number of Views:190
Avg rating:3.0/5.0
Title: Time-Domain Representations of LTI Systems
1
Time-Domain Representations of LTI Systems
2.1 Introduction
- Objectives
- Impulse responses of LTI systems
- Linear constant-coefficients differential or
difference equations of LTI systems - Block diagram representations of LTI systems
- State-variable descriptions for LTI systems
2.2 Convolution Sum
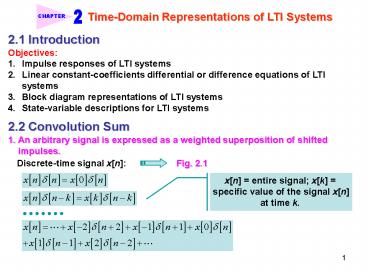
1. An arbitrary signal is expressed as a weighted
superposition of shifted impulses.
Discrete-time signal xn
Fig. 2.1
xn entire signal xk specific value of
the signal xn at time k.
2
Time-Domain Representations of LTI Systems
Figure 2.1 (p. 99)Graphical example
illustrating the representation of a signal xn
as a weighted sum of time-shifted impulses.
(2.1)
2. Impulse response of LTI system H
Output
Linearity
Linearity
(2.2)
3
Time-Domain Representations of LTI Systems
? The system output is a weighted sum of the
response of the system to time- shifted
impulses.
For time-invariant system
hn H? n ? impulse response of the LTI
system H
(2.3)
(2.4)
Convolution process Fig. 2.2.
3. Convolution sum
Figure 2.2a (p. 100) Illustration of the
convolution sum. (a) LTI system with impulse
response hn and input xn.
4
Time-Domain Representations of LTI Systems
Figure 2.2b (p. 101)(b) The decomposition of
the input xn into a weighted sum of
time-shifted impulses results in an output yn
given by a weighted sum of time-shifted impulse
responses.
d ? ?
5
Time-Domain Representations of LTI Systems
? The output associated with the kth input is
expressed as
Example 2.1 Multipath Communication Channel
Direct Evaluation of the
Convolution Sum
Consider the discrete-time LTI system model
representing a two-path propagation channel
described in Section 1.10. If the strength of the
indirect path is a ½, then
Letting xn ? n, we find that the impulse
response is
6
Time-Domain Representations of LTI Systems
Determine the output of this system in response
to the input
Input 0 for n lt 0 and n gt 0
ltSol.gt
1. Input
2. Since
3. Output
(convolution of xn and hn)
7
Time-Domain Representations of LTI Systems
2.3 Convolution Sum Evaluation Procedure
1. Convolution sum
k independent variable
2. Define the intermediate signal
(2.5)
n is treated as a constant by writing n as a
subscript on w.
h n ? k h ? (k ? n) is a reflected (because
of ? k) and time-shifted (by ? n) version of h
k.
3. Since
The time shift n determines the time at which we
evaluate the output of the system.
(2.6)
Example 2.2 Convolution Sum Evaluation by using
Intermediate Signal
Consider a system with impulse response
Use Eq. (2.6) to determine the output of the
system at time n ? 5, n 5, and n 10 when
the input is x n u n.
8
Time-Domain Representations of LTI Systems
ltSol.gt
Fig. 2.3 depicts xk superimposed on the
reflected and time-shifted impulse response hn ?
k.
1. h n ? k(3/4)n-kun-k
For n 10
2. Intermediate signal wnk
For n ? 5
(xkuk0, klt-5n)
Eq. (2.6)
y? 5 0
Eq. (2.6)
For n 5
Eq. (2.6)
9
Time-Domain Representations of LTI Systems
Figure 2.3 (p. 103) Evaluation of Eq. (2.6) in
Example 2.2. (a) The input signal xk above the
reflected and time-shifted impulse response hn
k, depicted as a function of k. (b) The product
signal w5k used to evaluate y 5. (c) The
product signal w5k used to evaluate y5. (d)
The product signal w10k used to evaluate y10.
10
Time-Domain Representations of LTI Systems
Procedure 2.1 Reflect and Shift Convolution Sum
Evaluation 1. Graph both xk and hn ? k as a
function of the independent variable k. To
determine hn ? k , first reflect hk about k
0 to obtain h? k. Then shift by ? n. 2.
Begin with n large and negative. That is, shift
h ? k to the far left on the time axis. 3.
Write the mathematical representation for the
intermediate signal wnk. 4. Increase the shift
n (i.e., move hn ? k toward the right) until
the mathematical representation for wnk
changes. The value of n at which the change
occurs defines the end of the current
interval and the beginning of a new interval. 5.
Let n be in the new interval. Repeat step 3 and 4
until all intervals of times shifts and the
corresponding mathematical representations for
wnk are identified. This usually implies
increasing n to a very large positive number. 6.
For each interval of time shifts, sum all the
values of the corresponding wnk to obtain
yn on that interval.
11
Time-Domain Representations of LTI Systems
Example 2.3 Moving-Average System
Reflect-and-shift Convolution Sum
Evaluation
The output yn of the four-point moving-average
system is related to the input xn according to
the formula
The impulse response hn of this system is
obtained by letting xn ?n, which yields
Fig. 2.4 (a).
Determine the output of the system when the input
is the rectangular pulse defined as
1st interval n lt 0 2nd interval 0 n 3
3rd interval 3 lt n 9 4th interval 9 lt n
12 5th interval n gt 12
Fig. 2.4 (b).
ltSol.gt
1. Refer to Fig. 2.4.
Five intervals !
2. 1st interval wnk 0
3. 2nd interval
For n 0
Fig. 2.4 (c).
12
Time-Domain Representations of LTI Systems
Figure 2.4 (p. 106)Evaluation of the
convolution sum for Example 2.3. (a) The system
impulse response hn. (b) The input signal
xn. (c) The input above the reflected and
time-shifted impulse response hn k, depicted
as a function of k. (d) The product signal wnk
for the interval of shifts 0 ? n ? 3. (e) The
product signal wnk for the interval of shifts 3
lt n ? 9. (f) The product signal wnk for the
interval of shifts 9 lt n ? 12. (g) The output
yn.
13
Time-Domain Representations of LTI Systems
6. 5th interval n gt 12
wnk 0
For n 1
7. Output
The output of the system on each interval n is
obtained by summing the values of the
corresponding wnk according to Eq. (2.6).
For general case n ? 0
1) For n lt 0 and n gt 12 yn 0.
Fig. 2.4 (d).
2) For 0 n 3
4. 3rd interval 3 lt n 9
Fig. 2.4 (g)
3) For 3 lt n 9
Fig. 2.4 (e).
5. 4th interval 9 lt n 12
4) For 9 lt n 12
Fig. 2.4 (f).
14
Time-Domain Representations of LTI Systems
Example 2.4 First-order Recursive System
Reflect-and-shift Convolution Sum
Evaluation
The input-output relationship for the first-order
recursive system is given by
Let the input be given by
We use convolution to find the output of this
system, assuming that b ? ? and that the system
is causal.
ltSol.gt
1. Impulse response
(2.7)
Since the system is causal, we have hn 0 for
n lt 0 (why?). For n 0, 1, 2, , we find that
h0 1, h1 ?, h2 ? 2, , or
2. Graph of xk and hn ? k Fig. 2.5 (a).
and
3. Intervals of time shifts
1st interval n lt ? 4 2nd interval n ? ? 4
15
Time-Domain Representations of LTI Systems
Figure 2.5ab (p. 109) Evaluation of the
convolution sum for Example 2.4. (a) The input
signal xk depicted above the reflected and
time-shifted impulse response hn k. (b) The
product signal wnk for 4 ? n.
16
Time-Domain Representations of LTI Systems
4. For n lt ? 4 wnk 0.
Next, we apply the formula for summing a
geometric series of n 5 terms to obtain
5. For n ? ? 4
Fig. 2.5 (b).
6. Output
Combining the solutions for each interval of time
shifts gives the system output
1) For n lt ? 4 yn 0.
2) For n ? ? 4
Fig. 2.5 (c).
Let m k 4, then
Assuming that ? 0.9 and b 0.8.
17
Time-Domain Representations of LTI Systems
Figure 2.5c (p. 110)(c) The output yn
assuming that p 0.9 and b 0.8.
18
Time-Domain Representations of LTI Systems
Example 2.5 Investment Computation
The first-order recursive system is used to
describe the value of an investment earning
compound interest at a fixed rate of r per
period if we set ? 1 (r/100). Let yn be the
value of the investment at the start of period n.
If there are no deposits or withdrawals, then the
value at time n is expressed in terms of the
value at the previous time as yn ? yn ? 1.
Now, suppose xn is the amount deposited (xn gt
0) or withdrawn (xn lt 0) at the start of period
n. In this case, the value of the amount is
expressed by the first-order recursive equation
We use convolution to find the value of an
investment earning 8 per year if 1000 is
deposited at the start of each year for 10 years
and then 1500 is withdrawn at the start each
year for 7 years.
ltSol.gt
1. Prediction Account balance to grow for the
first 10 year, and to decrease during next 7
years, and afterwards to continue growing.
2. By using the reflect-and-shift convolution sum
evaluation procedure, we can evaluate yn
xn ? hn, where xn is depicted in Fig. 2.6
and hn ? n un is as shown in Example
2.4 with ? 1.08.
19
Time-Domain Representations of LTI Systems
Figure 2.6 (p. 111)Cash flow into an
investment. Deposits of 1000 are made at the
start of each of the first 10 years, while
withdrawals of 1500 are made at the start of
each of the second 10 years.
3. Graphs of xk and hn ? k Fig. 2.7(a).
4. Intervals of time shifts
1st interval n lt 0 2nd interval 0 n 9
3rd interval 10 n 16 4th interval 17 n
5. Mathematical representations for wnk and
yn
1) For n lt 0 wnk 0 and yn 0
20
Time-Domain Representations of LTI Systems
Figure 2.7a-d (p. 111)Evaluation of the
convolution sum for Example 2.5. (a) The input
signal xk depicted above the reflected and
time-shifted impulse response h(n k). (b The
product signal wnk for 0 ? n ? 9. (c) The
product signal wnk for 10 ? n ? 16. (d) The
product signal wnk for 17 ? n.
21
Time-Domain Representations of LTI Systems
2) For 0 n 9
Fig. 2.7 (b).
Apply the formula for summing a geometric series
3) For 10 n 16
Fig. 2.7 (c).
22
Time-Domain Representations of LTI Systems
m k ? 10
Apply the formula for summing a geometric series
4) For 17 n
Fig. 2.7 (d).
23
Time-Domain Representations of LTI Systems
6. Fig. 2,7(e) depicts yn, the value of the
investment at the start of each period, by
combining the results for each of the four
intervals.
Figure 2.7e (p. 113)(e) The output yn
representing the value of the investment
immediately after the deposit or withdrawal at
the start of year n.
24
Time-Domain Representations of LTI Systems
2.4 The Convolution Integral
1. A continuous-time signal can be expressed as a
weighted superposition of time-shifted
impulses.
The sifting property of the impulse !
(2.10)
2. Impulse response of LTI system H
Output
Linearity property
(2.10)
3. h(t) H? (t) ? impulse response of the LTI
system H
If the system is also time invariant, then
A time-shifted impulse generates a time-shifted
impulse response output
(2.11)
(2.12)
Fig. 2.9.
25
Time-Domain Representations of LTI Systems
? Convolution integral
2.5 Convolution Integral Evaluation Procedure
1. Convolution integral
(2.13)
2. Define the intermediate signal
? independent variable, t constant
h (t ? ?) h (? (? ? t)) is a reflected and
shifted (by ? t) version of h(?).
3. Output
The time shift t determines the time at which we
evaluate the output of the system.
(2.14)
26
Time-Domain Representations of LTI Systems
Procedure 2.2 Reflect and Shift Convolution
Integral Evaluation 1. Graph both x(?) and h(t ?
?) as a function of the independent variable ? .
To obtain h(t ? ?), reflect h(?) about ? 0
to obtain h( ? ? ) and then h( ? ? ) shift by
? t. 2. Begin with the shift t large and
negative. That is, shift h( ? ? ) to the far left
on the time axis. 3. Write the mathematical
representation for the intermediate signal wt
(?). 4. Increase the shift t (i.e., move h(t ? ?)
toward the right) until the mathematical
representation for wt (?) changes. The value of t
at which the change occurs defines the end of
the current set and the beginning of a new
set. 5. Let t be in the new set. Repeat step 3
and 4 until all sets of shifts t and the
corresponding mathematical representations for wt
(?) are identified. This usually implies
increasing t to a very large positive number. 6.
For each sets of shifts t, integrate wt (?) from
? ? ? to ? ? to obtain y(t).
Example 2.6 Reflect-and-shift Convolution
Evaluation
Given
and
as depicted in Fig. 2-10,
Evaluate the convolution integral y(t) x(t) ?
h(t).
27
Time-Domain Representations of LTI Systems
Figure 2.10 (p. 117)Input signal and LTI system
impulse response for Example 2.6.
ltSol.gt
1. Graph of x(?) and h(t ? ?) Fig. 2.11 (a).
2. Intervals of time shifts Four intervals
1st interval t lt 1 2nd interval 1 t lt 3
3rd interval 3 t lt 5 4th interval 5 t
wt(?) 0
3. First interval of time shifts t lt 1
4. Second interval of time shifts 1 t lt 3
Fig. 2.11 (b).
28
Time-Domain Representations of LTI Systems
Figure 2.11 (p. 118)Evaluation of the
convolution integral for Example 2.6. (a) The
input x(?) depicted above the reflected and
time-shifted impulse response. (b) The product
signal wt(?) for 1 ? t lt 3. (c) The product
signal wt(?) for 3 ? t lt 5. (d) The system
output y(t).
t ? ?
29
Time-Domain Representations of LTI Systems
5. Third interval 3 t lt 5
Fig. 2.11 (c).
wt(?) 0
6. Fourth interval 5 t
7. Convolution integral
1) For t lt 1 and t ? 5 y(t) 0
2) For second interval 1 t lt 3, y(t) t ? 1
3) For third interval 3 t lt 5, y(t) 3 ? (t ?
2)
Figure 2.12 (p. 119)RC circuit system with the
voltage source x(t) as input and the voltage
measured across the capacitor y(t), as output.
Example 2.7 RC Circuit Output
For the RC circuit in Fig. 2.12, assume that the
circuits time constant is RC 1 sec. Ex. 1.21
shows that the impulse response of this circuit
is h(t) e ? t u(t).
Use convolution to determine the capacitor
voltage, y(t), resulting from an input voltage
x(t) u(t) ? u(t ? 2).
30
Time-Domain Representations of LTI Systems
ltSol.gt
RC circuit is LTI system, so y(t) x(t) ? h(t).
1. Graph of x(?) and h(t ? ?) Fig. 2.13 (a).
and
2. Intervals of time shifts Three intervals
1st interval t lt 0 2nd interval 0 t lt 2
3rd interval 2 t
wt(?) 0
3. First interval of time shifts t lt 0
4. Second interval of time shifts 0 t lt 2
For t gt 0,
Fig. 2.13 (b).
5. Third interval 2 t
Fig. 2.13 (c).
31
Time-Domain Representations of LTI Systems
Figure 2.13 (p. 120)Evaluation of the
convolution integral for Example 2.7. (a) The
input x(?) superimposed over the reflected and
time-shifted impulse response h(t ?), depicted
as a function of ?. (b) The product signal wt(?)
for 0? t lt 2. (c) The product signal wt(?) for
t ? 2. (d) The system output y(t).
t ? ?
32
Time-Domain Representations of LTI Systems
6. Convolution integral
1) For t lt 0 y(t) 0
2) For second interval 0 t lt 2
3) For third interval 2 t
Fig. 2.13 (d).
Example 2.8 Another Reflect-and-Shift Convolution
Evaluation
Suppose that the input x(t) and impulse response
h(t) of an LTI system are, respectively, given by
and
Find the output of the system.
33
Time-Domain Representations of LTI Systems
ltSol.gt
1. Graph of x(?) and h(t ? ?) Fig. 2.14 (a).
2. Intervals of time shifts Five intervals
1st interval t lt 0 2nd interval 0 t lt 2
3rd interval 2 t lt 3 4th interval 3 t lt
5 5th interval t ? 5
wt(?) 0
3. First interval of time shifts t lt 0
4. Second interval of time shifts 0 t lt 2
Fig. 2.14 (b).
5. Third interval of time shifts 2 t lt 3
Fig. 2.14 (c).
6. Fourth interval of time shifts 3 t lt 5
34
Time-Domain Representations of LTI Systems
Figure 2.14 (p. 121) Evaluation of the
convolution integral for Example 2.8. (a) The
input x(?) superimposed on the reflected and
time-shifted impulse response h(t ?), depicted
as a function of ?. (b) The product signal wt(?)
for 0 ? t lt 2. (c) The product signal wt(?) for 2
? t lt 3. (d) The product signal wt(?) for 3 ? t lt
5. (e) The product signal wt(?) for t ? 5. The
system output y(t).
t ? ?
35
Time-Domain Representations of LTI Systems
Fig. 2.14 (d).
7. Fifth interval of time shifts t ? 5
Fig. 2.14 (e).
8. Convolution integral
1) For t lt 0 y(t) 0
2) For second interval 0 t lt 2
3) For third interval 2 t lt 3 y(t) 2
4) For third interval 3 t lt 5
5) For third interval t ? 5 y(t) ? 2
36
Time-Domain Representations of LTI Systems
Fig. 2.14 (f).
Example 2.9 Radar range Measurement Propagation
Model
We identify an LTI system describing the
propagation of the pulse. Let the transmitted RF
pulse be given by
as shown in Fig. 2.16 (a).
Suppose we transmit an impulse from the radar to
determine the impulse response of the round-trip
propagation to the target. The impulse is delay
in time and attenuated in amplitude, which
results in the impulse response h(t) a ? (t ? ?
), where a represents the attenuation factor and
? the round-trip time delay. Use the convolution
of x(t) with h(t) to verify this result.
37
Time-Domain Representations of LTI Systems
ltSol.gt
1. Find h(t ? ?)
Reflecting h(t) a ? (t ? ? ) about ? 0 gives
h( ? ?) a ? (? ? ), since the impulse has
even symmetry.
2. Shift the independent variable ? by ? t to
obtain h(t ?? ) a ? (? ? (t ? ? )).
3. Substitute this equation for h(t ? ? ) into
the convolution integral of Eq. (2.12), and
use the shifting property of the impulse to
obtain the received signal as
Figure 2.16 (p. 124)Radar range measurement.
(a) Transmitted RF pulse. (b) The received echo
is an attenuated and delayed version of the
transmitted pulse.
38
Time-Domain Representations of LTI Systems
Example 2.10 Radar range Measurement (continued)
The Matched Filter
In Ex. 2.9, the received signal is contaminated
with noise (e.g., the thermal noise, discussed in
section 1.9) and may weak. For these reasons, the
time delay is determined by passing the received
signal through an LTI system commonly referred to
as a matched filter. An important property of
this system is that it optimally discriminates
against certain types of noise in the received
waveform. The impulse response of the matched
filter is a reflected, or time-reversed, version
of the transmitted signal x(t). That is, hm(t)
x(? t), so
As shown in Fig. 2.17 (a). The terminology
matched filter refers to the fact that the
impulse response of the radar receiver is
matched to the transmitted signal.
To estimate the time delay from the matched
filter output, we evaluate the convolution
ltSol.gt
1. Intermediate signal
39
Time-Domain Representations of LTI Systems
Figure 2.17a (p. 125)(a) Impulse response of
the matched filter for processing the received
signal.
t ? ?
Figure 2.17b (p. 126)(b) The received signal
r(?) superimposed on the reflected and
time-shifted matched filter impulse response hm(t
?), depicted as functions of ?. (c) Matched
filter output x(t).
40
Time-Domain Representations of LTI Systems
2. The received signal r(?) and the reflected,
time-shifted impulse response hm(t ? ?) are
shown in Fig. 2.17(b).
? hm(?) reflected version of x(t) ? hm(t ? ?)
x(t ? ?)
3. Intervals of time shifts Three intervals
1st interval t lt ? ? T0 2nd interval ? ? T0
lt t ? 3rd interval ? lt t ? T0 4th
interval t ? ? T0
wt(?) 0 and y(t) 0
4. First interval of time shifts t lt ? ? T0
5. Second interval of time shifts ? ? T0 lt t ?
41
Time-Domain Representations of LTI Systems
6. 3rd interval of time shifts ? lt t ? T0
wt(?) 0 and y(t) 0
7. 4th interval of time shifts t ? ? T0
8. The output of matched filter
Recommended
CrystalGraphics Presentations





























