
Newton - PowerPoint PPT Presentation
Title:
Newton
Description:
Twice differentiable function f(x), initial solution x0. ... Gauss-Newton (GN) method 2f(mk) m = H(m) m = [2J(mk)TJ(mk) Q(m)] m ignores Q(m)=2 fi(m) fi(m) ... – PowerPoint PPT presentation
Number of Views:56
Avg rating:3.0/5.0
Title: Newton
1
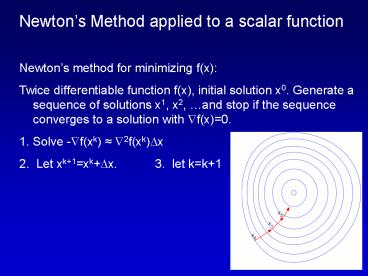
- Newtons Method applied to a scalar function
- Newtons method for minimizing f(x)
- Twice differentiable function f(x), initial
solution x0. Generate a sequence of solutions x1,
x2, and stop if the sequence converges to a
solution with ?f(x)0. - Solve -?f(xk) ?2f(xk)?x
- Let xk1xk?x. 3. let kk1
2
Newtons Method applied to LS Not directly
applicable to most nonlinear regression and
inverse problems (not equal of model parameters
and data points, no exact solution to G(m)d).
Instead we will use N.M. to minimize a nonlinear
LS problem, e.g. fit a vector of n parameters to
a data vector d. f(m)? (G(m)i-di)/?i2 Let
fi(m)(G(m)i-di)/?i i1,2,,m,
F(m)f1(m) fm(m)T So that f(m) ? fi(m)2
?f(m)? ??fi(m)2
m i1
m i1
m i1
3
NM Solve -?f(mk) ?2f(mk)?m LHS????f(mk)j
-? 2?fi(mk)jF(m)j -2 J(mk)F(mk) RHS ?2f(mk)?m
2J(m)TJ(m)Q(m)?m, where Q(m) 2 ? fi(m)
??fi(m) -2 J(mk)F(mk) 2 H(m) ?m ?m -H-1
J(mk)F(mk) -H-1 ?f(mk) (eq. 9.19) H(m)
2J(m)TJ(m)Q(m)
fi(m)(G(m)i-di)/?i i1,2,,m,
F(m)f1(m) fm(m)T
4
Gauss-Newton (GN) method ?2f(mk)?m H(m) ?m
2J(mk)TJ(mk)Q(m)?m ignores Q(m)2? fi(m)
??fi(m) ??f(m)2J(m)TJ(m), assuming fi(m) will
be reasonably small as we approach m. That is,
Solve -?f(xk) ?2f(xk)?x ?f(m)j?
2?fi(m)jF(m)j, i.e. J(mk)TJ(mk)?m-J(mk)TF(mk)
fi(m)(G(m)i-di)/?i i1,2,,m,
F(m)f1(m) fm(m)T
5
Newtons Method applied to LS Levenberg-Marquardt
(LM) method uses J(mk)TJ(mk)?I?m-J(mk)TF(mk)
?-gt0 GN ?-gtlarge, steepest descent (SD)
(down-gradient most rapidly). SD provides slow
but certain convergence. Which value of ? to use?
Small values when GN is working well, switch to
larger values in problem areas. Start with small
value of ?, then adjust.
6
Statistics of iterative
methods Cov(Ad)A Cov(d) AT (d has multivariate
N.D.) Cov(mL2)(GTG)-1GT Cov(d)
G(GTG)-1 Cov(d)?2I Cov(mL2)?2(GTG)-1 However,
we dont have a linear relationship between data
and estimated model parameters for the nonlinear
regression, so cannot use these formulas.
Instead F(m?m)F(m)J(m)?m Cov(m)(J(m)TJ(m
))-1 not exact due to linearization, confidence
intervals may not be accurate ) riG(m)i-di ,
?i1 s? ri2/(m-n) Cov(m)s2(J(m)TJ(m))-1
establish confidence intervals, ?2
7
- Implementation Issues
- Explicit (analytical) expressions for derivatives
- Finite difference approximation for derivatives
- When to stop iterating?
- ?f(m)0
- mk1-mk0, f(m)k1-f(m)k0
- eqs 9.47-9.49
- 4. Multistart method to optimize globally
8
Iterative Methods
SVD impractical when matrix has 1000s of rows
and columns e.g., 256 x 256 cell tomography
model, 100,000 ray paths, lt 1 ray hits 50 Gb
storage of system matrix, U 80 Gb, V 35
Gb Waste of storage when system matrix is
sparse Iterative methods do not store the system
matrix Provide approximate solution, rather than
exact using Gaussian elimination Definition
iterative method Starting point x0, do steps
x1, x2, Hopefully converge toward right
solution x
9
Iterative Methods
- Kaczmarzs algorithm
- Each of m rows of Gi.m di define an
n-dimensional hyperplane in Rm - Project initial m(0) solution onto hyperplane
defined by first row of G - Project m(1) solution onto hyperplane defined by
second row of G - until projections have been done onto all
hyperplanes - Start new cycle of projections until converge
- If Gmd has a unique solution, Kaczmarzs
algorithm will converge towards this - If several solutions, it will converge toward the
solution closest to m(0) - If m(0)0, we obtain the minimum length solution
- If no exact solution, converge fails, bouncing
around near approximate solution - If hyperplanes are nearly orthogonal, convergence
is fast - If hyperplanes are nearly parallel, convergence
is slow
10
- Conjugate Gradients Method
- Symmetric, positive definite system of equations
Axb - min ?(x) min(1/2 xTAx - bTx)
- ?(x) Ax - b 0 or Ax b
- CG method construct basis p0, p1, , pn-1 such
that piTApj0 when i?j. Such basis is mutually
conjugate w/r to A. Only walk once in
each direction and minimize - x ? ?ipi - maximum of n steps required!
- ?(?) 1/2 ? ?ipiT A ? ?ipi - bT ? ?ipi
- 1/2 ? ? ?i?jpiTA pj - bT ? ?ipi
(summations 0-gtn-1)
n-1 i0
11
- Conjugate Gradients
Method - piTApj0 when i?j. Such basis is mutually
conjugate w/r to A. - (pi are said to be A orthogonal)
- ?(?) 1/2 ? ? ?i?jpiTA pj - bT ? ?ipi
- 1/2 ? ?i?piTA pi - bT ? ?ipi
- 1/2 (? ?i?piTA pi - 2 ?ibT pi) - n
independent terms - Thus min ?(?) by minimizing ith term ?i?piTA pi -
2 ?ibT pi - -gtdiff w/r ?i and set derivative to zero ?i
bTpi / piTA pi - i.e., IF we have mutually conjugate basis, it is
easy to minimize ?(?)
12
- Conjugate Gradients
Method - CG constructs sequence of xi, rib-Axi, pi
- Start x0, r0b, p0r0, ?0r0Tr0/p0TAp0
- Assume at kth iteration, we have x0, x1, , xk
r0, r1, , rk - p0, p1, , pk ?0, ?1, , ?k
- Assume first k1 basis vectors pi are mutually
conjugate to A, first k1 ri are mutually
orthogonal, and riTpj0 for i ?j - Let xk1 xk?kpk
- and rk1 rk-?kApk which updates correctly,
since - rk1 b - Axk1 b - A(xk?kpk) (b-Axk) -
?kApk rk-?kApk
13
- Conjugate Gradients
Method - Let xk1 xk?kpk
- and rk1 rk-?kApk
- ?k1 rk1Trk1/rkTrk
- pk1 rk1?k1pk
- bTpkrkTrk (eq 6.33-6.38)
- Now we need proof of the assumptions
- rk1 is orthogonal to ri for ik (eq 6.39-6.43)
- rk1Trk0 (eq 6.44-6.48)
- rk1 is orthogonal to pi for ik (eq 6.49-6.54)
- pk1TApi 0 for ik (eq 6.55-6.60)
- ik pk1TApk 0 ie CG generates mutually
conjugate basis
14
- Conjugate Gradients
Method - Thus shown that CG generates a sequence of
mutually conjugate basis vectors. In theory, the
method will find an exact solution in n
iterations. - Given positive definite, symmetric system of eqs
Axb, initial solution x0, let ?00,
p-10,r0b-Ax0, k0 - If kgt0, let ?k rkTrk/rk-1Trk-1
- Let pk rk?kpk-1
- Let ?k rkTrk / pkTA pk
- 4. Let xk1 xk?kpk
- 5. Let rk1 rk-?kApk
- 6. Let kk1
15
- Conjugate Gradients Least Squares
Method - CG can only be applied to positive definite
systems of equations, thus not applicable to
general LS problems. Instead, we can apply the
CGLS method to - min Gm-d2
- GTGmGTd
16
- Conjugate Gradients Least Squares
Method - GTGmGTd
- rk GTd-GTGmk GT(d-Gmk) GTsk
- sk1d-Gmk1d-G(mk?kpk)(d-Gmk)-?kGpksk-?kG
pk - Given a system of eqs Gmd, k0, m00, p-10,
?00, r0GTs0. - If kgt0, let ?k rkTrk/rk-1Trk-1
- Let pk rk?kpk-1
- Let ?k rkTrk / GpkTG pk
- 4. Let mk1 mk?kpk
- 5. Let sk1sk-?kGpk
- 6. Let rk1 rk-?kGpk
- 7. Let kk1 never computing GTG, only Gpk,
GTsk1
17
- L1 Regression
- LS (L2) is strongly affected by outliers
- If outliers are due to incorrect measurements,
the inversion should minimize their effect on the
estimated model. - Effects of outliers in LS is shown by rapid
fall-off of the tails of the Normal Distribution - In contrast the Exponential Distribution has a
longer tail, implying that the probability of
realizing data far from the mean is higher. A few
data points several ? from ltdgt is much more
probable if drawn from an exponential rather than
from a normal distribution. Therefore methods
based on exponential distributions are able to
handle outliers better than methods based on
normal distributions. Such methods are said to be
robust.
18
- L1 Regression
- min ? di -(Gm)i/?i min dw-Gwm1
- thus more robust to outliers because error is not
squared - Example repeating measurement m times
- 1 1 1T m d1 d2 dmT
- mL2 (GTG)-1GTd m-1 ? di
- f(m) d-Gm1 ? di-m
- Non-differentiable if mdi
- Convex, so local minimaglobal minima
- f(m) ? sgn(di-m), sgn(x)1 if xgt0, -1 if
xlt0, 0 if x0 - 0 if half is , half is -
- ltdgtest median, where 1/2 of data is lt ltdgtest,
1/2 gt ltdgtest
19
- L1 Regression
- Finding min dw-Gwm1 is not trivial.
Several methods available, such as IRLS, solving
a series of LS problems converging to a 1-norm - rd-Gm
- f(m) d-Gm1 r1 ? ri
- non-differentiable if ri0. At other points
- f(m) ?f(m)/?mk - ? Gi,k sgn(ri) -? Gi,k
ri/ri - ?f(m) -GTRr -GTR(d-Gm)
- Ri,i1/ri
- ?f(m) -GTR(d-Gm) 0
- GTRGm GTRd R depends on m, nonlinear system
( - IRLS!
20
convolution
S(t)h(t)f(t) ?h(t-k) f(k) dk ? ht-k
fk h1 0 0 s1
assuming h(t) and f(t) are of length h2 h1 0
s2 5 and 3,
respectively h3 h2 h1 f1
s3 h4 h3 h2 f2 s4 h5 h4
h3 f3 s5 0 h5 h4
s6 0 0 h5
s7 Here, recursive
solution is easy
21
convolution Shaping filtering AxD, D
desired response, A,D known a1 a2 a3 a0 a1
a2 a-1 a0 a1 . The matrix ?ij is formed by
the auto-correlation of at with zero-lag values
along the diagonal and auto-correlations of
successively higher lags off the diagonal. ?ij is
symmetric of order n
a1 a0 a-1 a2 a1 a0 a3 a2 a1 .
?????????? ????????????????? ?????????????
?????? ?
22
convolution ATD becomes . a-1 a-2 a-3 a0
a-1 a-2 a1 a0 a-1 . The matrix cij is formed
by the cross-correlation of the elements of A and
D. Solution (ATA)-1ATD ?-1c
. d-1 d0 d1 .
. c1 c0 c-1
.
23
Example Find
a filter, 3 elements long, that convolved with
(2,1) produced (1,0,0,0) (2,1)(f1,f2,f3)(1,0,
0,0) a-1 a-2 a-3 a0 a-1 a-2 a1 a0
a-1 . The matrix cij is formed by the
cross-correlation of the elements of A and D.
Solution (ATA)-1ATD ?-1c
c1 c0 c-1 .
d-1 d0 d1 .
Recommended
CrystalGraphics Presentations





























