
Gain Compensation - PowerPoint PPT Presentation
1 / 8
Title: Gain Compensation
1
Gain Compensation
Dr Will Browne Frequency Design CY2A2
7/1 Compensation Techniques
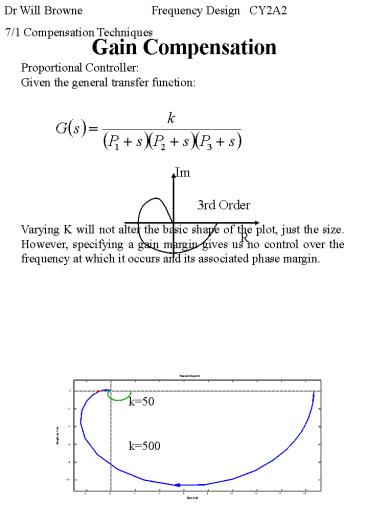
Proportional Controller Given the general
transfer function Varying K will not
alter the basic shape of the plot, just the size.
However, specifying a gain margin gives us no
control over the frequency at which it occurs and
its associated phase margin.
Im 3rd Order
R
Nyquist Diagram
0
k50 k500
-2
-4
Imaginary Axis
-6
-8
-10
-2
0
2
4
6
8
10
12
14
16
Real Axis
2
Phase Compensation
7/2 Compensation Techniques
Consider a first order compensator DC
unity gain. ZERO break frequency POLE break
frequency - Phase lag compensator -
Phase lead compensator
3
Phase Lag Compensation
7/3 Compensation Techniques
Consider a first order compensator DC
unity gain (gain k 1). - Phase lag
compensator Maximum phase lag (90) at The
overall effect is to reduce the high frequency
gain and introduce a phase lag. The high
frequency gain is reduced by a factor of A phase
lag compensator can be thought of as a form of
low pass filter
Magnitude ?p ?m
?o (gain k 10) ? -?m
4
Placement
7/4 Compensation Techniques
Consider a third order system
Looking at the frequency regions A,B C A
Small gain, high frequency, not much use putting
phase lag here. B Vincinity of (-1) point,
adding pole zero will destabilise system. C
Phase lag here will not affect stability, reduced
gain will increase GM, best place for compensator.
5
Phase Lag Design Procedure
7/5 Compensation Techniques
To design a controller of the form with a
specified phase margin of ?m. 1. Adjust the DC
gain of Gp(s)H(s) to satisfy low frequency
specifications (Kc). This will satisfy system
requirements such as steady state error,
disturbance rejection etc... 2. Find the
frequency (i) at which the angle Gp(j?)H(j?)
(-180 ?m 5). We force the phase margin to
occur at this frequency by reducing the OL gain
to unity.
6
Phase Lag Design Procedure
7/6 Compensation Techniques
3. The magnitude of the zero is given by ?o
0.1 ?i (EQ1) ie. makes ?o lt
?i , keeping it all in area C (hence the 5
factor). 4. The ratio of the compensator pole
zero is given by
(EQ2) 5. From equations 12 the compensator
transfer function can be written in the form
7
Phase Lag Design Procedure
7/7 Compensation Techniques
QUESTION Given the following transfer function
meets DC specifications and Design a phase lag
compensator to give a phase margin of
50. Plot the Bode Nyquist diagrams,
either by hand or using Matlab Using Matlab,
plot the time response of both systems to a unit
step input.
8
Example Code
7/8 Compensation Techniques
Needs Matlab control Toolbox, but you can
convert using rm functions ptf(3,1 3 2 0)
initial Plant system 3/s(s1)(s2)
subplot(1,3,1) bode(p) plot bode diagram on
left subplot(1,3,2) Nyquist(p)block bode
diagram on right, includes -ve w close the
loop on each system and plot time response
fpminreal(feedback(p,1)) yp,tstep(fp,
35)determine the step response of the system
for 35 seconds stept 1 0tgraph to show
step response subplot(1,3,3) plot(t,yp,t,
stept, 'c') pausetime response of system
clfclear the current figure kp series(3,p)
a gain of three implemented subplot(1,3,1)
bode(kp) plot bode diagram on left
subplot(1,3,2) Nyquist(kp)block bode diagram
on right close the loop on each system and
plot time response fkp
minreal(feedback(kp,1)) ykp,tstep(fkp,
35)determine the step response of the system
stept 1 0t subplot(1,3,3)
plot(t,ykp,t, stept, 'c') pause clfclear
the current figure ctf(0.61 2,1
5) lead-lag controller (s1)/(s2) ckp
series(c,kp) a controler implemented
subplot(1,3,1) bode(ckp) plot bode diagram
on left subplot(1,3,2) Nyquist(ckp)block
bode diagram on right fckp
minreal(feedback(ckp,1)) yckp,tstep(fckp,
35)determine the step response of the system
stept 1 0t subplot(1,3,3)
plot(t,yckp,t, stept, 'c')
Recommended
CrystalGraphics Presentations





























