
Target Tracking in Distributed Sensor Networks - PowerPoint PPT Presentation
1 / 18
Title:
Target Tracking in Distributed Sensor Networks
Description:
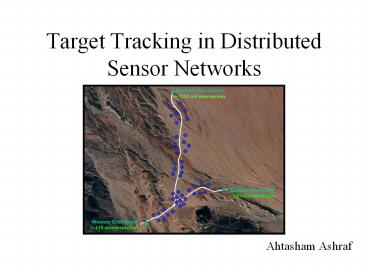
In this way the target moves through the network & regions are created. ... We keep on monitoring when the target is about to escape the current region ... – PowerPoint PPT presentation
Number of Views:363
Avg rating:3.0/5.0
Title: Target Tracking in Distributed Sensor Networks
1
Target Tracking in Distributed Sensor Networks
- Ahtasham Ashraf
2
Presentation Outline
- Objective Approach
- Elements of a Basic MTT System
- Target Dynamics Estimation
- Alpha-Beta Filters, Kalman Filter
- Multiple Target Tracking
- Gating, Data Association, NN, JPDA, MHT.
- References
3
Objective Approach
- The idea is to track multiple targets moving
through a distributed sensor network using
multiple modalities. - The whole Sensor Network is divided into regions
which can be dynamically created may overlap
with each other. - Each sensor of the active regions performs the
native detections for the targets emanating
different modality signals.
4
Approach Continued..
- The time series data is used to classify the
targets into various predefined categories, which
can be used to assist the multiple target
tracking case. - The detection classification results are used
by the Localizer in the Manager Nodes to perform
target position estimation after region
detection. - The tracking algorithm is being used to process
the Localizer output to generate tracks make
accurate predictions for the future target
positions. - New regions are created as the target escapes the
current regions surveillance area. - In this way the target moves through the network
regions are created.
5
Elements of a Basic MTT System
- The figure shows the functional elements of a
simple recursive Multi-Target Tracking system - It shows a convenient partitioning of the overall
system for introduction but there is a
considerable overlap of the functions of these
elements. The distinction between individual
elements becomes less apparent when recently
developed techniques like MHT are used. - Assume this recursive processing is being used
tracks have been formed on previous scans. - Now the Detection Localization Algs do the
necessary Sensor Data Proc hence produce a set
of Observations. - First of all, these observations are gated with
current tracks so as to simplify the later
association process. Then more refined Data
Association Alg are used to determine the final
assignments.
6
Continued
- Observations not assigned to existing tracks can
initiate new Tentative Tracks. A tentative track
becomes a Confirmed Track when it satisfies some
quality number of observation tests. - Similarly Low quality Tracks, as determined by
the update history, are deleted. - Finally the Track Update Alg is used to predict
the track in the future time. - The Uncertainty in Covariances is used to make
the gates for next Data Assoc recursion.
7
Target Dynamics Estimation
- The objective of this block is to use the current
measurements give an accurate estimate of the
position of vehicle also to predict where the
target would be after certain time T. - The state estimation has its basics in the
principles of Least Squares Estimation. LSE is
basically a batch processing method that uses
multiple scans of data to estimate parameters
that are assumed constant over the data
collection interval. However a recursive form of
LSE can be derived it leads to Kalman
Filtering. - (70s) Alpha-Beta (80s) Adaptive Kalman
- (90s) Interactive Multiple Model (IMM) (00s )
Non-linear filtering? - Advantage of KF is to provide a convenient manner
to introduce Process noise to model random target
motions.
8
Continued
- KF gain is chosen automatically based on assumed
target maneuver measurement noise model. - Provides a convenient measure of estimation
accuracy through Covariance Matrix. This is
helpful in data association stage. - Can compensate partially for effects of
miss-detections by increasing the Prediction Cov
Matrix elements to reflect the expected error
association with uncertain data. (JPDA) - Can use interacting multiple KF in parallel to to
track maneuvering targets.
9
(No Transcript)
10
Kalman Filter
- The Kalman filter can be used to addresses the
general problem of trying to estimate the state
of a discrete-time process that is governed by
the linear stochastic difference equation - where the State Transition Matrix A is given by
- Its a Constant Velocity model the target
acceleration is modeled as white noise w(k) - The measurement model
- z(k) HX(k) v(k)
- The random variables w(k) and v(k) represent the
process and measurement noise respectively. - They are assumed to be independent (of each
other), white and with normal probability
distributions - p(w) N(0,Q) p(v) N(0,R)
11
- Q The process noise covariance matrix
- R The measurement noise covariance matrix
- The Process noise Covariance Matrices for the
constant velocity filter is given by - where sm is the std dev of maneuver T is the
observation interval. - These can be easily derived from the equations of
motion - S vit ½ at2
- Vf Vi at
12
- The Measurement Covariance for the constant
velocity filter is given by - To start the Filter we have to specify the State
Vector X(k) .This can be specified by proper
track Initiation procedures e.g. M/N rule. - So once the track is established every incoming
localization result is used to update the
recursive Kalman Filter to generate an estimate
of the current (Filtered) position the
Predicted position after some time T. - We keep on monitoring when the target is about to
escape the current region when that time comes
a new region is created the track is handed
over to the next region. - In this way the Track ID, State vector Process
Covariance matrices are propagated along the
network as the target moves. - If we dont get observations for a track till
certain number of observation intervals, we can
drop the track.
13
Multiple Target Tracking
- In case of multiple targets, in the same region,
the detection localization algorithms should be
capable enough to sense the presence of multiple
targets hence give proportional number of (x,y)
observations to the tracking algorithm. Also the
classifier should also be able to identify the
vehicles based on their signatures in order to
help the tracker in updating their respective
tracks. - This gives rise to the Data Association Problem.
Update Which Track with Which Observation? - This problem can be solved by the help of
Classifier OR certain Probabilistic techniques.
14
Data Association
- GATING This is the process of specifying a
region within which we are expecting the next
observation. This helps in eliminating the false
observations to a large extent. For those
observations which fall within the gates, Data
Association Algs are used. - Different types of gates can be used depending
upon the data behavior e.g Circular, Elliptical
V Gates. - The size of the gate is calculated at each
recursion from the Prediction Covariance Matrix.
So gates grow shrink in size due to
miss-detections. - Those Tracks which share observations with each
other are grouped together are called
Clusters. - Data Association Algs are run on these Clusters.
15
Data Association ( Techniques.. )
- -- Nearest Neighborhood Assoc.
- It is the simplest method and maintains the
single most likely hypothesis. A Hypothesis is an
assignment from a set of Observations to a set of
Tracks. - O1, O2, O3 ? T1, T2
- But the NN approach chooses only one of the many
hypothesis discards the others without giving
any measure of the correctness of the decision,
which may be wrong sometimes due to the
measurement accuracy. - X(k1) X(k) K(k1)z(k) HX(k)
- Not good with multiple observations case within a
gate. - Auction Alg can be used for solving this problem.
16
JPDA (Joint Probabilistic Data Association)
- Its a multiple hypothesis data association
technique developed to handle multiple targets
(as opposed to PDA which was for single targets),
in which the probability of each hypothesis is
calculated by - ß False Alarm density Pfa/Vg
- x y no of tracks in the hypoth
- xno of tracks that get obs assigned
- y no of tracks that dont get obs assigned
- So no observation is discarded all of them are
used to update the track but with some
probabilistic weights. - Residue ? pijz(k) Hxi(k)
- X(k1) X(k) K(k1)Residue
17
MHT (Multiple Hypothesis Testing)
- JPDA has the disadvantage in case of very close
hypothesis. - A better approach is to use a Delayed Decision
Logic so that hypothesis are propagated in
anticipation that subsequent data will resolve
the uncertainty. - The Track Oriented MHT Approach deals with the
tracks adds or deletes(prunes) tracks on each
scan. - One should expect a potential combinatoric
explosion of hypothesis , but there are different
techniques to prune them at each scan. - Its computationally expensive but can work in
complex cases.
18
References
- Estimation Tracking Principles Techniques.
By Yaakov Bar-Shalom and Xiao-Rong Li - Design and Analysis of Modern Tracking Systems.
By Blackman and Robert Popoli - Applied Optimal Estimation. By Arthur Gelb
- Bayesian Multiple Target Tracking By Stone,
Barlow Corwin - Multitarget-Multisensor Tracking Principles
Techniques By Yaakov Bar-Shalom Xiao-Rong Li - Multi-Sensor Fusion By Brooks and Iyengar
Recommended
CrystalGraphics Presentations





























