
Control of UAV Teams - PowerPoint PPT Presentation
Title:
Control of UAV Teams
Description:
Control of UAV Teams Pre-condition We need someone for a BDA role! Post-condition WASM Michael Lewis University of Pittsburgh WASM Simulator AC-130 Simulator – PowerPoint PPT presentation
Number of Views:9
Avg rating:3.0/5.0
Title: Control of UAV Teams
1
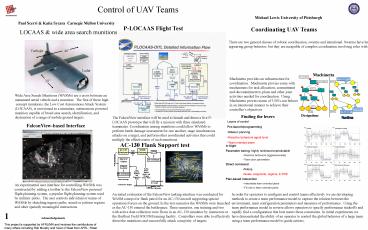
Control of UAV Teams
Michael Lewis University of Pittsburgh
Paul Scerri Katia Sycara Carnegie Mellon
University
P-LOCAAS Flight Test
Coordinating UAV Teams
LOCAAS wide area search munitions
There are two general classes of robotic
coordination, swarms and intentional Swarms have
large numbers of homogeneous, low capability
individuals who generate intelligent appearing
group behavior, but they are incapable of complex
coordination involving roles with differentiated
behavior. Intentional coordination requires
explicit and complex coordination mechanisms,
such as reasoning about joint intentions and
teamwork. Behaviorally cued swarming is good for
formation flying but bad for more variable forms
of cooperation such as BDA, joint attacks, flush
hit, etc. that will be needed to make
cooperating UAVs a truly effective asset.
Turbojet
40
Ladar
Machinetta
Machinetta provides an infrastructure for
coordination. Machinetta proxies come with
mechanisms for task allocation, commitment and
decommitment to plans and other joint activities
needed for coordination. Using Machinetta
proxies teams of UAVs can behave in an
intentional manner to achieve their controllers
objectives
30
Wide Area Search Munitions (WASMs) are a cross
between an unmanned aerial vehicle and a
munition. The first of these high concept
munitions, the Low Cost Autonomous Attack System
(LOCAAS), is envisioned as a miniature,
autonomous powered munition capable of broad
area search, identification, and destruction of
a range of mobile ground targets.
Finding the levers
The FalconView interface will be used to launch
and direct a live P-LOCAAS prototype that will
fly a mission with three simulated teammates.
Coordination among munitions could allow WASMs to
perform battle damage assessment for one another,
stage simultaneous attacks on a target, and
perform other coordinated activities that could
multiply the effectiveness of such munitions.
- Layers of control
- Pre-launch/programming
- Mission planning
- Reactive behaviors agent level
- Team oriented plans
FalconView-based Interface
AC-130 Flank Support test
- In flight
- Parameter tuning highly nonlinear/unpredictable
- Reactive behaviors (aggressiveness)
- Team plan parameters
- Direct command
- Teleop
- Goals waypoints, regions, ROE
- Plan-based interaction
- Instantiate team oriented plans
- Fill role in team oriented plans
An experimental user interface for controlling
WASMs was constructed by adding a toolbar to the
FalconView personal flight planning system, a
popular flight planning system used by military
pilots. The user controls individual or teams of
WASMs by sketching ingress paths, search or
jettison regions and other spatially meaningful
instructions.
An initial evaluation of the FalconView tasking
interface was conducted for WASM conops for flank
patrol for an AC-130 aircraft supporting special
operations forces on the ground. In the test
scenarios the WASMs were launched as the AC-130
entered the battlespace. Three scenarios, one
training and two with active data collection were
flown in an AC-130 simulator by instructors at
the Hurlburt Field SOCOM training facility.
Controllers were able to effectively direct the
munitions and successfully attack a majority of
targets.
In order for operators to configure and control
teams effectively we are developing methods to
create a team performance model to capture the
relation between the environment, team
configuration parameters and measures of
performance. Using the team performance model in
reverse allows operators to specify performance
tradeoffs and rapidly find a configuration that
best meets those constraints. In initial
experiments we have demonstrated the ability of
an operator to control the global behavior of a
large team using a team performance model to
guide actions.
1 Acknowledgements This project is
supported by AFRL/MN and involves the
contributions of many others including Rob Murphy
and Kevin ONeal from AFRL, Rolan Tapia and Doug
Zimmerer of Lockheed-Martin, and Paul Arezina
from the University of Pittsburgh
Recommended
CrystalGraphics Presentations





























