
linear systems of equations notation - PowerPoint PPT Presentation
1 / 13
Title:
linear systems of equations notation
Description:
Solving systems of equations. 3. elements of matrix algebra ... Elementary operations for equations Elementary row operations for matrices ... – PowerPoint PPT presentation
Number of Views:56
Avg rating:3.0/5.0
Title: linear systems of equations notation
1
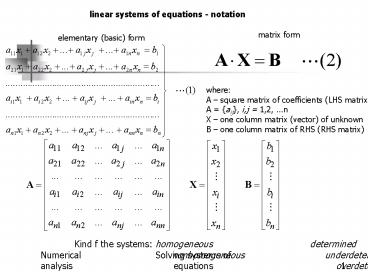
linear systems of equations - notation
matrix form
elementary (basic) form
where A square matrix of coefficients (LHS
matrix) A aij, i,j 1,2, ...n X one column
matrix (vector) of unknown B one column matrix
of RHS (RHS matrix)
Kind f the systems homogeneous
determined
nonhomogeneous
underdetermined
overdetermined
2
elements of matrix algebra addition,
transposition
3
elements of matrix algebrakind of matrixes,
properties of the operations
commutation role associative law for
addition separation role
4
elements of matrix algebramatrix product
Basic properties of matrix multiplication
5
elements of matrix algebrainverse matrix
Theorem The inverse matrix A-1 of an n ? n
matrix A exists if and only if rank A n
Such a matrix A is called a nonsingular matrix.
If it has no inverse, it is singular matrix. For
singular matrix its Determinant
DetAA0. Rank A of matrix A is equal to
maximum number of linear independent row vectors
of matrix A. Matrixes A and AT have the same
rank. Hence, the rank of matrix A is equal also
to maximum number of linear independent column
vectors of matrix A. Rank of matrix A is equal
to n if for any scalars c1, c2, ...cn
6
elements of matrix algebraeigenvalues and
eigenvectors, diagonalization
Eigenvectors of matrix of square nn matrix A -
solution of the eigenvalue problem
The solution of eq. (1), (2) exists, if
- characteristic equation
7
Kinds of the systems, existence of the solution
Systemsnonhomogeneous
homogeneous
- Approaches
- searching (or no) pivots,
- partial or total pivoting,
- symmetry systems,
- band matrices,
- frontal methods,
- sparse systems,
- systems having many RHS
- Practical numerical methods
- Gauss elimination,
- Gauss-Jordan elimination,
- methods of factorization,
- iterative methods (Gauss Seidel method).
8
Gauss elimination method
Approaches for explanation of elimination
Elementary operations for equations
Elementary row operations for
matrices
- multiplication of an eq. by non-zero constant
- multiplication of a row by non-zero constant
- addition the modified eq. to another equation
- addition the modified row to another equation
- interchange of two equations
- interchange of two rows
Results x11, x2-1, x32
9
Gauss elimination method
Where
10
Gauss-Jordan elimination method
Gauss elimination
possible many RHS
11
Methods of factorization
Factorization of matrix A
- Approaches
- Doolitles,
- Crouts,
- Richardsons
12
Methods of iteration
13
Solving nonlinear systems of equations
Notation of the systems
- iterative methods (eq. (2), (3),
- optimization methods,
- - Newtons method
iterative methods
Relaxation !
Termination criterion, e.g. eq. (5), p.11
Simplified approach
Recommended
CrystalGraphics Presentations




























