
An Introduction to Sensor Fusion - PowerPoint PPT Presentation
1 / 34
Title:
An Introduction to Sensor Fusion
Description:
Anyone test the accuracy of the IRs on the Aibo? How was the ambient light? ... Consider a ship sailing east with a perfect compass trying to estimate its position. ... – PowerPoint PPT presentation
Number of Views:1254
Avg rating:3.0/5.0
Title: An Introduction to Sensor Fusion
1
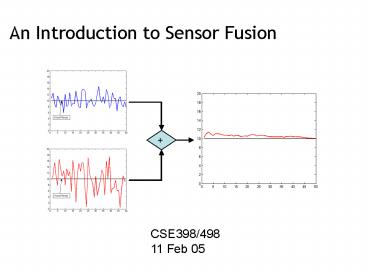
An Introduction to Sensor Fusion
CSE398/498 11 Feb 05
2
Seminar Announcement Today at 410PM,
PL466
- Dr. Metin Sitti, "Robotics at the Micro and Nano
Scales"
3
Administration
- Lab sessions are ongoing
- Still have a few bugs to iron out with Linux
- Change to course format
- Team Challenges are added
- Depending on progress these may migrate to full
scrimmages - Course grade distribution adjusted to reflect
this
4
Clarifications to Team Challenge 1
- Obstacle heights will be at a height gt the
Aibos nose - The maze will be sparse no walls, just
obstacles - If you need more time because of hardware issues,
let me know ASAP - Any other questions?
5
Coordinate Transformations Conclusion
6
Homogeneous Transformation Matrices in Three
Dimensions
- The representation readily extends to three
dimensions
7
Coordinate Transformations Example
The distance from the camera in the dogs nose
to the origin of the head frame is 8 cm, as is
the body frame from the head frame. If only the
neck joint is tilted by an angle f, write the
homogenous transform relating the nose position
in the head frame with the body frame.
8
Composing Homogenous Transformations
- Perhaps the strongest point for the homogeneous
transformation representation is the ability to
compose multiple transformations across multiple
frames - Suppose we would like to estimate the position of
a point that has seen coordinate transformations
across 2 frames
3p
1A2
3y
3x
2A3
9
Composing Homogenous Transformations
2p
3p
1A2
3y
1p
3x
2A3
- This generalizes for n frames
- NOTE The transformations are done LOCAL to the
current frame
10
Homework Exercise Due 18 Feb 05 at the
BEGINNING of Class
- The Aibo sees the soccer ball in the center of
the camera image - The ball is estimated to be 1 meter away from the
camera frame - Its head is tilted up 20 degrees
- Its head is panned to the left 45 degrees
- Its neck is tilted down 30 degrees
- Q1 What are the necessary homogeneous
transformations to calculate the balls position
in the body frame? - Q2 What is the balls position in the body
frame? - Make certain that you show all your work!
11
SummaryCoordinate Transformations
- Points are defined with respect to a specific
coordinate frame - Often, it is convenient to measure a point with
respect to one frame (e.g. an objects position
in the sensor frame), but it must be transformed
to another frame for other reasons (e.g.
navigational convenience) - Coordinate transformations provide this mechanism
- The transformation necessary to align coordinate
frame F1 with frame F2 is also the same
transformation necessary to convert points from
frame F2 to frame F1 - Homogeneous coordinates provide a convenient
means for representing and composing rigid
transformations
12
An Introduction to Sensor Fusion
13
Motivation
- Lets say our Aibo detects an opponent at a
distance of 100 cm with its nose IR, but the same
opponent reads at a distance of 80 cm from its
chest IR. - What is our estimate of the distance?
14
Why arent the Sensor Measurements Correct?
- Anyone test the accuracy of the IRs on the Aibo?
- How was the ambient light?
- What color was the target?
- Are the errors the same for all ranges?
- What about the orientation of the target surface?
- Is it sensor noise?
- What about bias?
- There are many reasons
- These are often lumped (incorrectly) into the
term sensor noise
15
How should we Merge the Measurements?
- Cant we just average them?
16
Merging Data from Heterogeneous Sensors
- Lets say that instead you have 2 different (not
very accurate) sensor measuring the distance to a
target over time - How could you combine the data to get the best
estimate possible for the true range to target?
17
Merging Data from Heterogeneous Sensors (contd)
- Why not just average them?
- That works OK, but not really well
- Can we do more?
mean err 1.71
mean err 1.75
18
Fusing Sensor Data
- Our ability to do something intelligent with
the sensor data is a function of what we know
about the sensors themselves - The more accurate sensor model we have, the
better our estimation performance will be - These models are typically generated in a time
consuming, empirical fashion - Sensor models can vary dramatically as a function
of the operational environment (recall the Aibo
example) - Often sensor models are represented compactly in
the terms of probability density
functions/distributions
19
A Brief Probability Review
20
Basic Concepts
- p(x) denotes the probability that outcome x will
occur (or that proposition x is true) - Random Variables
- A random variable x can take on any values
associated with its sample space X - Boolean true, false, heads, tails
- Multi-valued 1,2,3,4,5,6 the sides of a die
- Continuous a x b
21
A Quick Primer/Refresher
- The expected value for a random variable X is
(i.e. the mean) defined as - The variance of X about the mean is defined as
22
Probability Density Functions (PDFs)
- A probability density function pX(x) is a
mapping of probability values to all elements x ?
X - A pdf can be discrete or continuous
multi-modal
unimodal
uniform
sample continuous pdfs
23
Properties of PDFs
- p(x) 0
- The sum of probabilities over the sample space
equals to 1, i.e. - For continuous distributions, p(x)0 for x ? X
- Rather than look at the probability of a point
for a continuous distribution, we look at the
probability over intervals, i.e.
24
Some Important PDFs
- The uniform distribution is defined as
- Our friend, the Gaussian distribution
- Particle distributions
1/(b-a)
a
b
25
Probability Distribution Function
- The probability distribution is defined as
- Some properties of the probability distribution
26
The Gaussian Distribution
- A 1-D Gaussian distribution is defined as
- In 2-D (assuming uncorrelated variables) this
becomes - In n dimensions, it generalizes to
27
The Gaussian Distribution (contd)
- Gaussian distributions are popular for modeling
sensor noise - This is often justified by the central limit
theorem which states that given a set of n
independent variates with arbitrary PDFs of
finite variance, then the average of these tends
to be normal - The ulterior motive is that Gaussian functions
have many useful mathematical properties which
allow them to be used to obtain elegant
theoretical results - The convolution of 2 Gaussian functions is a
Gaussian - The Fourier transform of a Gaussian function is a
Gaussian - Separability
28
A Simple Sensor Fusion Examplewith a Gaussian
Noise Model
- Consider a ship sailing east with a perfect
compass trying to estimate its position. - You estimate the position x from the stars as
z1100 with a precision of sx4 miles
100
x
Borrowed from Maybeck, 1979
29
A Simple Example (contd)
- Along comes a more experienced navigator, and she
takes her own sighting z2 - She estimates the position x z2 125 with a
precision of sx3 miles - How do you merge her estimate with your own?
x
30
A Simple Example (contd)
x
31
A Simple Example (contd)
- With the distributions being Gaussian, the best
estimate for the state is the mean of the
distribution, so - or alternately
Correction Term
32
Lets Apply this to Our Example
- Lets assume that we knew that the standard
deviation of our sensors was 2 meters (blue) and
4 meters (red)
33
What if we had Merely Averaged the Data Over
Time Instead
- The time average is in effect assuming that the
variance of the two sensors are the same - If we know better, we can use this to obtain a
more accurate estimate
34
Summary
- Sensor fusion refers to the techniques applied in
(intelligently) merging multiple sensor
measurements across different sensors and/or time
in order to obtain a more accurate estimate of
some parameter of interest (e.g. the position of
a target) - The quality of your fused estimate will be a
direct function of the accuracy of your sensor
model - In practice, the best models are often obtained
empirically - These empirical data are often fit to a Gaussian
model when possible for mathematical convenience - The primary motivation for this is the Kalman
Filter and Extended Kalman Filter (EKF)
algorithms that rely upon the Gaussian
assumption, and work extremely well in theory and
practice
Recommended
CrystalGraphics Presentations




























