
Pathplanning PowerPoint PPT Presentations
All Time
Recommended

Approximation Algorithms for. Path-Planning Problems ... Constant factor approximation if we can exceed deadlines by a small constant factor ...
| PowerPoint PPT presentation | free to download

Human-Robot Interaction through a Dynamic Virtual Environement. Andrew Fagg, ... data shared through buffer lying on server - neat, easy (maps, goals ...) Demo ...
| PowerPoint PPT presentation | free to view

Organizational Chart. Project Overview. Overview of Technical Approach ... U.S. Army / Georgia Tech sponsored technology demonstration (1994 - 1997) with ...
| PowerPoint PPT presentation | free to view
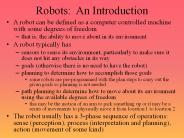
A robot can be defined as a computer controlled machine with some degrees of freedom that is, the ability to move about in its environment A robot typically has
| PowerPoint PPT presentation | free to download
There are infinitely many ways to program a robot, but ... Consider a robot that moves in a maze: what does the robot need to know to navigate and get out? ...
| PowerPoint PPT presentation | free to download

... and moves toward them; suppresses wander layer. Wander layer: Generates random movement commands ... inhibits wander layer. send path to pathplan. pathplan ...
| PowerPoint PPT presentation | free to view

Allows the robot to seek out interesting places to visit ... Steels' Mars explorer system, using the subsumption architecture, achieves near ...
| PowerPoint PPT presentation | free to view

Adds two mini-modules to the system: 'Wander', and 'Avoid' Implementation ... Adds the mini-modules 'Stereo', 'Look', 'Pathplan', 'Integrate', and 'Whenlook' ...
| PowerPoint PPT presentation | free to download

A Robust Layered Control System for a Mobile ... allows for intelligent interaction with the world Processing steps should be self-calibrating Robots should be ...
| PowerPoint PPT presentation | free to download

Given weighted graph G, root s, reward on nodes. v Construct a path P rooted at s ... No approximation algorithm known previously for the rooted non-geometric version ...

Collect large amounts of candy between 6pm and 8pm. Goal: Get as much ... Brownie points for each request serviced. Goal: Maximize the total brownie points ...