
Beveglsesm - PowerPoint PPT Presentation
1 / 27
Title:
Beveglsesm
Description:
Beveglsesm nstre og koordinatsystem Grunnleggende frame.. X er rett fremover. Origo ligger i akse 1 med z rett opp. H yredreid system.! Enklte situasjoner krever ... – PowerPoint PPT presentation
Number of Views:145
Avg rating:3.0/5.0
Title: Beveglsesm
1
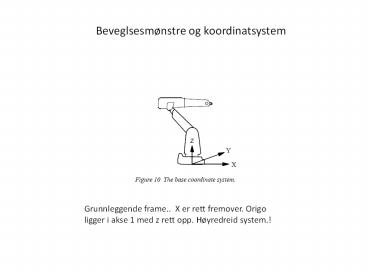
Beveglsesmønstre og koordinatsystem
Grunnleggende frame.. X er rett fremover. Origo
ligger i akse 1 med z rett opp. Høyredreid
system.!
2
Enklte situasjoner krever en underliggende
worldframe
3
Forskjellige fixtures gis individuelle
frames.User frames
4
Object frames.
Object frames er det laveste nivået i frame
hirarkiet Det er hendig å ha frames på objekter.
Justeres disse så slipper vi å justere
posisjonene siden disse normalt er gitt i forhold
til objekt frames. Vi flytter bare på frames
når vi justerer på objektene fysisk. Objektkoordi
natene benyttes vanligvis når vi jogger
TCP.
5
Forskyvning av elementer gis i forhold til et
referansesystem
6
Verktøyets pos. Og plassering TCP
Uten ekstra verktøy er TCP midt på flensen foran
på roboten.
7
Med et montert verktøy vil TCP modifiseres.Dette
må beskrives i en toolbeskrivelse. Posisjon og
orientering
8
Tool TCP framen defineres i forhold til
flenssenteret.
9
Bevegelsesmønster-Vi spesifiserer Endepunk
tet for bevegelsen Interpolasjonsmetoden Joint
eller Lineær Hastigheten i mm/sek opp til
2500mm/s Zone data. (Hvordan TCP skal passere
dest. Punktet) Framen for tool og objekt.
10
Joint interpolasjon
Joint intepolasjon flytter alle aksene til ny
destinasjon med lik tid på endringene på alle
akser. Det betyr at alle sluttverdier nåes
samtidig. TCP beskriver neppe en rett linje i
rommet.
11
Lineær interpolasjon
Lineær interpolasjon fører til at TCP beskriver
en rett linje i rommet fra startpunkt til
endepunkt. Siden dette fører til en ulineær
bevegelse i jonts vil hastigheten muligens
bremses ned i forhold til bestilt
hastighet. Dette vil spesielt merkes i nærheten
av singulariteter.
12
Sirkulær interpolasjon
Beskrives ved Circle point og destination point
hastighetzonetoolobjekt
13
Singulære punkter
Lineær og sirkulær bevegelse forbi singulariteter
kan være problematisk fordi enkelte joint vil få
en meget høy hastighet.
14
Zoner
15
Interpolasjon av hastighet og orientering
16
Overlappende zoner
17
Soft servo
På ABB140 har vi mulighet for å bruke soft
servo. Armen oppfører seg da som en fjær med
større styrke dess større avvik vi har fra
korrekt bane. Endring av softprameteren kan
utføres mens roboten går. Soft servo kan
dessuten slås på eller av programmessig når vi
måtte ønske det
18
Soft servo
På ABB140 har vi mulighet for å bruke soft
servo. Armen oppfører seg da som en fjær med
større styrke dess større avvik vi har fra
korrekt bane. Endring av softprameteren kan
utføres mens roboten går. Soft servo kan dessuten
slås på eller av programmessig når vi måtte ønske
det Soft
19
- SoftAct - Activating the soft servo
- Usage
- SoftAct (Soft Servo Activate) is used to activate
the so called soft servo on any axis of the - robot or external mechanical unit.
- This instruction can only be used in the main
task T_ROB1 or, if in a MultiMove system, in - any motion tasks.
20
- Basic examples
- Example 1
- SoftAct 3, 20 Max softness 100
- Activation of soft servo on robot axis 3 with
softness value 20. - Example 2
- SoftAct 1, 90 \Ramp150
- Activation of the soft servo on robot axis 1 with
softness value 90 and ramp factor 150. - SoftDeact (Soft Servo Deactivate) is used to
deactivate the - so called soft servo.
21
Sekvensiell utførelse ved bruk av fine.
22
Sekvensiell utførelse ved passering (zoneDT)
23
Samtidig utførelse
24
Konfigurasjoner
25
Konfigurasjoner 2
Vi må derfor spesifisere hvilken konfigurasjon vi
vil ha.
26
Konfig spesifikasjon
Forskjellig for forskjellige roboter. IRB140
spesifiseres ve 4 tall som sier hvordan aksene
1,4,6 og en intern (beregnet akse) står.
27
Feil i konfigurering
Roboten flytter alltid til den programmerete
konfigurasjonen Dersom dette ikke er mulig vil
programmet stoppe med feilmelding før den
utføres. Dersom konfigurasjonssjekk er slått av
(ConfL\off)flyttes det til den nærmeste mulige
konfigurasjon. Stopp skyldes som oftest Offline
programmering med feil konfig Tool har blitt
skiftet og vi har nye toolparametre Posisjonen
har forandret seg fordi objektframen har flyttet
seg.
Recommended
CrystalGraphics Presentations





























