
EFFECTS OF ICE IMMERSION ON GAIT STABILITY - PowerPoint PPT Presentation
Title:
EFFECTS OF ICE IMMERSION ON GAIT STABILITY
Description:
All participants completed two testing sessions in random order, during which gait testing was performed under normal and desensitized conditions. – PowerPoint PPT presentation
Number of Views:63
Avg rating:3.0/5.0
Title: EFFECTS OF ICE IMMERSION ON GAIT STABILITY
1
EFFECTS OF ICE IMMERSION ON GAIT STABILITY AS
MEASURED BY THE LARGEST LYAPUNOV EXPONENT
Alvaro Guevara Department of Mathematics, LSU,
Baton Rouge, LA.
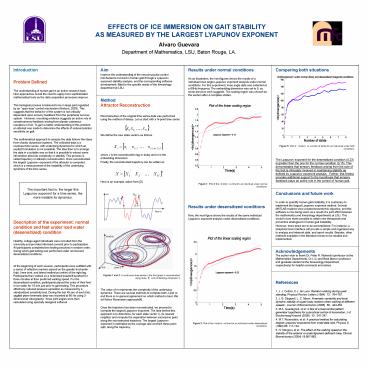
Introduction Problem Defined The understanding of human gait is an active research topic. New approaches reveal the need to apply more sophisticated mathematical tools as the data acquisition processes improve. This biological process is believed to be in large part regulated by an open-loop control mechanism (Neilson, 2003). This suggests that the behavior of the system is not critically dependent upon sensory feedback from the peripheral nervous system. However, mounting evidence suggests an active role of somatosensory feedback arising from plantar cutaneous receptors in foot. To gain a better understanding of this problem, an attempt was made to determine the effects of reduced plantar sensitivity on gait. The mathematical approach to analyze the data follows the ideas from chaotic dynamical systems. The collected data is a nonlinear time series, with underlying dynamics for which an explicit formulation is not available. The idea then is to arrange the data in a suitable way so that it is possible to extract some information about its complexity or stability. This process is called trajectory or attractor reconstruction. Once reconstructed, the largest Lyapunov exponent of the attractor is computed, which is a measurement of the instability of the underlying dynamics of the time series. Description of the experiment normal condition and feet under iced water (desensitized) condition Healthy, college-aged individuals were recruited from the university and provided informed consent prior to participation. All participants completed two testing sessions in random order, during which gait testing was performed under normal and desensitized conditions. At the beginning of each session, participants were outfitted with a series of reflective markers placed on the greater trochanter (hip), knee joint, and lateral malleolus (ankle) of the right leg. Participants then walked on a motorized treadmill barefoot for three minutes at their preferred walking speed. For the desensitized condition, participants placed the soles of their feet in ice water for 15 min just prior to gait testing. This procedure effectively reduced pressure sensation as measured by a standardized sensitivity test. During the last 45 sec of each trial, sagittal plane kinematic data was recorded at 60 Hz using 2-dimensional videography. Knee joint angles were then calculated using specially designed software. Aim Improve the understanding of the neuromuscular control mechanisms involved in human gait through a Lyapunov exponent stability analysis, and the corresponding software development, fitted to the specific needs of the kinesiology department at LSU. Results under normal conditions As an illustration, the next figures shows the results of a individual knee angle Lyapunov exponent analysis under normal conditions. For this experiment, knee angle data was collected at a 60Hz frequency. The embedding dimension was set to 5, as some previous work suggests. The scaling region was chosen as the section after 4 complete strides. Figure 1 Plot of the ltln(div)gt vs time for an individual under normal conditions. Results under desensitized conditions Now, the next figure shows the results of the same individual Lyapunov exponent analysis under desensitized conditions. Comparing both situations Figure 5 Plot of ltln(div)gt vs number of stride for an individual under both conditions. The Lyapunov exponent for the desensitized condition (0.23) is greater than the one for the normal condition (0.15). This demonstrates that sensory feedback arising from the sole of the foot is intricately involved in maintaining stability as defined by Lyapunov exponent analysis. Further, this finding provides additional support to the hypothesis that sensory feedback plays an active role in the control of human gait.
Introduction Problem Defined The understanding of human gait is an active research topic. New approaches reveal the need to apply more sophisticated mathematical tools as the data acquisition processes improve. This biological process is believed to be in large part regulated by an open-loop control mechanism (Neilson, 2003). This suggests that the behavior of the system is not critically dependent upon sensory feedback from the peripheral nervous system. However, mounting evidence suggests an active role of somatosensory feedback arising from plantar cutaneous receptors in foot. To gain a better understanding of this problem, an attempt was made to determine the effects of reduced plantar sensitivity on gait. The mathematical approach to analyze the data follows the ideas from chaotic dynamical systems. The collected data is a nonlinear time series, with underlying dynamics for which an explicit formulation is not available. The idea then is to arrange the data in a suitable way so that it is possible to extract some information about its complexity or stability. This process is called trajectory or attractor reconstruction. Once reconstructed, the largest Lyapunov exponent of the attractor is computed, which is a measurement of the instability of the underlying dynamics of the time series. Description of the experiment normal condition and feet under iced water (desensitized) condition Healthy, college-aged individuals were recruited from the university and provided informed consent prior to participation. All participants completed two testing sessions in random order, during which gait testing was performed under normal and desensitized conditions. At the beginning of each session, participants were outfitted with a series of reflective markers placed on the greater trochanter (hip), knee joint, and lateral malleolus (ankle) of the right leg. Participants then walked on a motorized treadmill barefoot for three minutes at their preferred walking speed. For the desensitized condition, participants placed the soles of their feet in ice water for 15 min just prior to gait testing. This procedure effectively reduced pressure sensation as measured by a standardized sensitivity test. During the last 45 sec of each trial, sagittal plane kinematic data was recorded at 60 Hz using 2-dimensional videography. Knee joint angles were then calculated using specially designed software. MethodAttractor Reconstruction Reconstruction of the original time series data was performed using the method of delays. Let us start with a N-point time series We define the new state vectors as follows where J is the reconstruction lag or delay and m is the embedding dimension. Finally, the reconstructed trajectory can be written as Here is an example, taken from 2. Figures 1 and 2 A continuous time series in the first graph is reconstructed using delay and embedding dimension 3 The value of m represents the complexity of the underlying dynamics. There are several methods to compute both J and m, and there is no general agreement on which method is best. We will follow Rosenstein approach4. Once the trajectory has been reconstructed, we proceed to compute the largest Lyapunov exponent. The idea behind this approach is to determine, for each state vector Xi, its nearest neighbor and compute the separation between successive pairs along the reconstructed trajectory. The largest Lyapunov exponent is estimated as the average rate at which these pairs split, along the trajectory. Results under normal conditions As an illustration, the next figures shows the results of a individual knee angle Lyapunov exponent analysis under normal conditions. For this experiment, knee angle data was collected at a 60Hz frequency. The embedding dimension was set to 5, as some previous work suggests. The scaling region was chosen as the section after 4 complete strides. Figure 1 Plot of the ltln(div)gt vs time for an individual under normal conditions. Results under desensitized conditions Now, the next figure shows the results of the same individual Lyapunov exponent analysis under desensitized conditions. Comparing both situations Figure 5 Plot of ltln(div)gt vs number of stride for an individual under both conditions. The Lyapunov exponent for the desensitized condition (0.23) is greater than the one for the normal condition (0.15). This demonstrates that sensory feedback arising from the sole of the foot is intricately involved in maintaining stability as defined by Lyapunov exponent analysis. Further, this finding provides additional support to the hypothesis that sensory feedback plays an active role in the control of human gait.
Introduction Problem Defined The understanding of human gait is an active research topic. New approaches reveal the need to apply more sophisticated mathematical tools as the data acquisition processes improve. This biological process is believed to be in large part regulated by an open-loop control mechanism (Neilson, 2003). This suggests that the behavior of the system is not critically dependent upon sensory feedback from the peripheral nervous system. However, mounting evidence suggests an active role of somatosensory feedback arising from plantar cutaneous receptors in foot. To gain a better understanding of this problem, an attempt was made to determine the effects of reduced plantar sensitivity on gait. The mathematical approach to analyze the data follows the ideas from chaotic dynamical systems. The collected data is a nonlinear time series, with underlying dynamics for which an explicit formulation is not available. The idea then is to arrange the data in a suitable way so that it is possible to extract some information about its complexity or stability. This process is called trajectory or attractor reconstruction. Once reconstructed, the largest Lyapunov exponent of the attractor is computed, which is a measurement of the instability of the underlying dynamics of the time series. Description of the experiment normal condition and feet under iced water (desensitized) condition Healthy, college-aged individuals were recruited from the university and provided informed consent prior to participation. All participants completed two testing sessions in random order, during which gait testing was performed under normal and desensitized conditions. At the beginning of each session, participants were outfitted with a series of reflective markers placed on the greater trochanter (hip), knee joint, and lateral malleolus (ankle) of the right leg. Participants then walked on a motorized treadmill barefoot for three minutes at their preferred walking speed. For the desensitized condition, participants placed the soles of their feet in ice water for 15 min just prior to gait testing. This procedure effectively reduced pressure sensation as measured by a standardized sensitivity test. During the last 45 sec of each trial, sagittal plane kinematic data was recorded at 60 Hz using 2-dimensional videography. Knee joint angles were then calculated using specially designed software. MethodAttractor Reconstruction Reconstruction of the original time series data was performed using the method of delays. Let us start with a N-point time series We define the new state vectors as follows where J is the reconstruction lag or delay and m is the embedding dimension. Finally, the reconstructed trajectory can be written as Here is an example, taken from 2. Figures 1 and 2 A continuous time series in the first graph is reconstructed using delay and embedding dimension 3 The value of m represents the complexity of the underlying dynamics. There are several methods to compute both J and m, and there is no general agreement on which method is best. We will follow Rosenstein approach4. Once the trajectory has been reconstructed, we proceed to compute the largest Lyapunov exponent. The idea behind this approach is to determine, for each state vector Xi, its nearest neighbor and compute the separation between successive pairs along the reconstructed trajectory. The largest Lyapunov exponent is estimated as the average rate at which these pairs split, along the trajectory. Results under normal conditions As an illustration, the next figures shows the results of a individual knee angle Lyapunov exponent analysis under normal conditions. For this experiment, knee angle data was collected at a 60Hz frequency. The embedding dimension was set to 5, as some previous work suggests. The scaling region was chosen as the section after 4 complete strides. Figure 1 Plot of the ltln(div)gt vs time for an individual under normal conditions. Results under desensitized conditions Now, the next figure shows the results of the same individual Lyapunov exponent analysis under desensitized conditions. Conclusions and future work In order to quantify human gait instability, it is customary to implement the largest Lyapunov exponent method. Several MATLAB routines were created towards this objective, and this software is now being used, as a result of a joint effort between the mathematics and kinesiology departments at LSU. This would in turn make possible to obtain new therapeutic and preventive strategies for human gait instability. However, more tasks are to be accomplished. For instance, a Graphical User Interface will provide a simple and organized way to analyze and interpret data, and report results. Besides, other methods available in the literature remain to be studied and implemented.
Introduction Problem Defined The understanding of human gait is an active research topic. New approaches reveal the need to apply more sophisticated mathematical tools as the data acquisition processes improve. This biological process is believed to be in large part regulated by an open-loop control mechanism (Neilson, 2003). This suggests that the behavior of the system is not critically dependent upon sensory feedback from the peripheral nervous system. However, mounting evidence suggests an active role of somatosensory feedback arising from plantar cutaneous receptors in foot. To gain a better understanding of this problem, an attempt was made to determine the effects of reduced plantar sensitivity on gait. The mathematical approach to analyze the data follows the ideas from chaotic dynamical systems. The collected data is a nonlinear time series, with underlying dynamics for which an explicit formulation is not available. The idea then is to arrange the data in a suitable way so that it is possible to extract some information about its complexity or stability. This process is called trajectory or attractor reconstruction. Once reconstructed, the largest Lyapunov exponent of the attractor is computed, which is a measurement of the instability of the underlying dynamics of the time series. Description of the experiment normal condition and feet under iced water (desensitized) condition Healthy, college-aged individuals were recruited from the university and provided informed consent prior to participation. All participants completed two testing sessions in random order, during which gait testing was performed under normal and desensitized conditions. At the beginning of each session, participants were outfitted with a series of reflective markers placed on the greater trochanter (hip), knee joint, and lateral malleolus (ankle) of the right leg. Participants then walked on a motorized treadmill barefoot for three minutes at their preferred walking speed. For the desensitized condition, participants placed the soles of their feet in ice water for 15 min just prior to gait testing. This procedure effectively reduced pressure sensation as measured by a standardized sensitivity test. During the last 45 sec of each trial, sagittal plane kinematic data was recorded at 60 Hz using 2-dimensional videography. Knee joint angles were then calculated using specially designed software. MethodAttractor Reconstruction Reconstruction of the original time series data was performed using the method of delays. Let us start with a N-point time series We define the new state vectors as follows where J is the reconstruction lag or delay and m is the embedding dimension. Finally, the reconstructed trajectory can be written as Here is an example, taken from 2. Figures 1 and 2 A continuous time series in the first graph is reconstructed using delay and embedding dimension 3 The value of m represents the complexity of the underlying dynamics. There are several methods to compute both J and m, and there is no general agreement on which method is best. We will follow Rosenstein approach4. Once the trajectory has been reconstructed, we proceed to compute the largest Lyapunov exponent. The idea behind this approach is to determine, for each state vector Xi, its nearest neighbor and compute the separation between successive pairs along the reconstructed trajectory. The largest Lyapunov exponent is estimated as the average rate at which these pairs split, along the trajectory. Results under normal conditions As an illustration, the next figures shows the results of a individual knee angle Lyapunov exponent analysis under normal conditions. For this experiment, knee angle data was collected at a 60Hz frequency. The embedding dimension was set to 5, as some previous work suggests. The scaling region was chosen as the section after 4 complete strides. Figure 1 Plot of the ltln(div)gt vs time for an individual under normal conditions. Results under desensitized conditions Now, the next figure shows the results of the same individual Lyapunov exponent analysis under desensitized conditions. AcknowledgementsThe author wish to thank Dr. Peter R. Wolenski (professor at the Mathematics Department), Dr Li Li and Brad Manor (professor and graduate student at the Kinesiology Department, respectively) for helpful comments and advice.
Introduction Problem Defined The understanding of human gait is an active research topic. New approaches reveal the need to apply more sophisticated mathematical tools as the data acquisition processes improve. This biological process is believed to be in large part regulated by an open-loop control mechanism (Neilson, 2003). This suggests that the behavior of the system is not critically dependent upon sensory feedback from the peripheral nervous system. However, mounting evidence suggests an active role of somatosensory feedback arising from plantar cutaneous receptors in foot. To gain a better understanding of this problem, an attempt was made to determine the effects of reduced plantar sensitivity on gait. The mathematical approach to analyze the data follows the ideas from chaotic dynamical systems. The collected data is a nonlinear time series, with underlying dynamics for which an explicit formulation is not available. The idea then is to arrange the data in a suitable way so that it is possible to extract some information about its complexity or stability. This process is called trajectory or attractor reconstruction. Once reconstructed, the largest Lyapunov exponent of the attractor is computed, which is a measurement of the instability of the underlying dynamics of the time series. Description of the experiment normal condition and feet under iced water (desensitized) condition Healthy, college-aged individuals were recruited from the university and provided informed consent prior to participation. All participants completed two testing sessions in random order, during which gait testing was performed under normal and desensitized conditions. At the beginning of each session, participants were outfitted with a series of reflective markers placed on the greater trochanter (hip), knee joint, and lateral malleolus (ankle) of the right leg. Participants then walked on a motorized treadmill barefoot for three minutes at their preferred walking speed. For the desensitized condition, participants placed the soles of their feet in ice water for 15 min just prior to gait testing. This procedure effectively reduced pressure sensation as measured by a standardized sensitivity test. During the last 45 sec of each trial, sagittal plane kinematic data was recorded at 60 Hz using 2-dimensional videography. Knee joint angles were then calculated using specially designed software. MethodAttractor Reconstruction Reconstruction of the original time series data was performed using the method of delays. Let us start with a N-point time series We define the new state vectors as follows where J is the reconstruction lag or delay and m is the embedding dimension. Finally, the reconstructed trajectory can be written as Here is an example, taken from 2. Figures 1 and 2 A continuous time series in the first graph is reconstructed using delay and embedding dimension 3 The value of m represents the complexity of the underlying dynamics. There are several methods to compute both J and m, and there is no general agreement on which method is best. We will follow Rosenstein approach4. Once the trajectory has been reconstructed, we proceed to compute the largest Lyapunov exponent. The idea behind this approach is to determine, for each state vector Xi, its nearest neighbor and compute the separation between successive pairs along the reconstructed trajectory. The largest Lyapunov exponent is estimated as the average rate at which these pairs split, along the trajectory. Figure 2 Plot of the ltln(div)gt vs time for an individual under desensitized conditions. References 1. J. J. Collins, C.J. de Luca Random walking during quiet standing, Physical Review Letters (1994) 73 764-767. 2. J. B. Dingwell, L. C. Marin Kinematic variability and local dynamic stability of upper body motions when walking at different speeds , Journal of Biomechanics (2006) 39 444-452. 3. M.A. Guadagnoli, et al A test of a dual central pattern generator hypothesis for subcortical control of locomotion, J of Electromyog Kinesiol (2000) 10 241-247. 4. M.T. Rosenstein, et al A practical method for calculating largest Lyapunov exponents from small data sets, Physica D (1993) 65 117-134. 5. N. Stergiou, et al The effect of the walking speed on the stability of the anterior cruciate ligament deficient knee, Clinical Biomechanics (2004) 19957-963.
The important fact is the larger this Lyapunov exponent for a time series, the more instable its dynamics.