
Elements of Feedback Control - PowerPoint PPT Presentation
Title:
Elements of Feedback Control
Description:
And Frequency Domain Specifications G(s) C(s) Goal: 1) Define typical good freq resp shape for closed-loop 2) Relate closed-loop freq response shape to step ... – PowerPoint PPT presentation
Number of Views:159
Avg rating:3.0/5.0
Title: Elements of Feedback Control
1
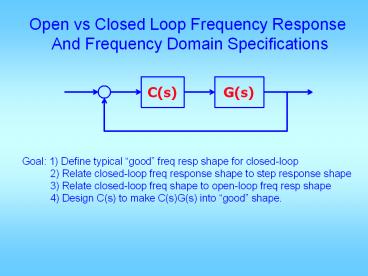
Open vs Closed Loop Frequency Response And
Frequency Domain Specifications
G(s)
C(s)
Goal 1) Define typical good freq resp shape
for closed-loop 2) Relate closed-loop
freq response shape to step response shape
3) Relate closed-loop freq shape to open-loop
freq resp shape 4) Design C(s) to make
C(s)G(s) into good shape.
2
Prototype 2nd order system closed-loop frequency
response
For small zeta, resonance freq is about wn BW
ranges from 0.5wn to 1.5 wn For good z range, BW
is 0.8 to 1.1 wn So take BW wn
z0.1
0.2
0.3
No resonance for z lt 0.7 Mr0.5dB for
z0.6 Mr3dB for z0.5 Mr7dB for z0.4
w/wn
3
Closed-loop BW to wn ratio
BW1.4wn
z
4
Prototype 2nd order system closed-loop frequency
response
z0.1
When z lt0.5 ? visible resonance peak near wwn
When z gt0.6 ?no visible resonance peak
0.2
0.3
No resonance for z lt 0.7 Mrlt0.5 dB for
z0.6 Mr1.2 dB for z0.5 Mr2.5 dB for z0.4
wwn
w/wn
5
Prototype 2nd order system closed-loop frequency
response Mr vs z
6
Percentage Overshoot in closed-loop step response
z
7
Percentage Overshoot in closed-loop step response
Mr
8
Percentage Overshoot in closed-loop step response
Mr in dB
9
Phase Margin
PM 100z
z
10
PMMp 70 line
Percentage Overshoot in closed-loop step response
Phase Margin in degrees
11
0.2
z0.1
0.3
0.4
wgc
In the range of good zeta, wgc is about 0.65
times to 0.8 times wn
w/wn
12
Open-loop wgc to wn ratio
wgc0.7wn
z
13
In the range of good zeta, PM is about 100z
z0.1
0.2
0.3
0.4
w/wn
14
Important relationships
- Closed-loop BW are very close to wn
- Open-loop gain cross over wgc (0.650.8) wn,
- When z lt 0.6, wr and wn are close
- When z gt 0.7, no resonance
- z determines phase margin and Mp
- z 0.4 0.5 0.6 0.7
- PM 44 53 61 67 deg 100z
- Mp 25 16 10 5
15
Desired Bode plot shape
16
Proportional controller design
- Obtain open loop Bode plot
- Convert design specs into Bode plot req.
- Select KP based on requirements
- For improving ess KP Kp,v,a,des / Kp,v,a,act
- For fixing Mp select wgcd to be the freq at
which PM is sufficient, and KP 1/G(jwgcd) - For fixing speed from td, tr, tp, or ts
requirement, find out wn, let wgcd wn and
choose KP as above
17
- clear all
- n0 0 40 d1 2 0
- figure(1) clf margin(n,d)
- proportional control design
- figure(1) hold on grid Vaxis
- Mp 10/100
- zeta sqrt((log(Mp))2/(pi2(log(Mp))2))
- PMd zeta 100 3
- semilogx(V(12), PMd-180 PMd-180,'r')
- get desired w_gc
- xginput(1) w_gcd x(1)
- KP 1/abs(polyval(n,jw_gcd)/polyval(d,jw_gcd))
- figure(2) margin(KPn,d)
- figure(3) stepchar(KPn, dKPn)
18
PD Controller
19
KP/KD
20log(KP)
Place wgcd here
20
(No Transcript)
21
- n0 0 1 d0.02 0.3 1 0
- figure(1) clf margin(n,d)
- Mp 10/100
- zeta sqrt((log(Mp))2/(pi2(log(Mp))2))
- PMd zeta 100 3
- tr 0.3 w_n1.8/tr w_gcd w_n
- PM angle(polyval(n,jw_gcd)/polyval(d,jw_gcd))
- phi PMdpi/180-PM Td tan(phi)/w_gcd
- KP 1/abs(polyval(n,jw_gcd)/polyval(d,jw_gcd))
- KP KP/sqrt(1Td2w_gcd2) KDKPTd
- ngc conv(n, KD KP)
- figure(2) margin(ngc,d)
- figure(3) stepchar(ngc, dngc)
Could be a little less
22
Variation
- Restricted to using KP 1
- Meet Mp requirement
- Find wgc and PM
- Find PMd
- Let f PMd PM (a few degrees)
- Compute TD tan(f)/wgcd
- KP 1 KDKPTD
23
- n0 0 5 d0.02 0.3 1 0
- figure(1) clf margin(n,d)
- Mp 10/100
- zeta sqrt((log(Mp))2/(pi2(log(Mp))2))
- PMd zeta 100 18
- GM,PM,wgc,wpcmargin(n,d)
- phi (PMd-PM)pi/180 Td tan(phi)/wgc
- Kp1 KdKpTd
- ngc conv(n, Kd Kp)
- figure(2) margin(ngc,d)
- figure(3) stepchar(ngc, dngc)
24
(No Transcript)
25
(No Transcript)
26
(No Transcript)
27
(No Transcript)
28
(No Transcript)
29
Lead Controller Design
30
plead
zlead
20log(Kzlead/plead)
Goal select z and p so that max phase lead is at
desired wgc and max phase lead PM
defficiency!
31
(No Transcript)
32
Lead Design
- From specs gt PMd and wgcd
- From plant, draw Bode plot
- Find PMhave 180 angle(G(jwgcd)
- DPM PMd - PMhave a few degrees
- Choose aplead/zlead so that fmax DPM and it
happens at wgcd
33
Lead design example
- Plant transfer function is given by
- n50000 d1 60 500 0
- Desired design specifications are
- Step response overshoot lt 16
- Closed-loop system BWgt20
34
n50000 d1 60 500 0 Gtf(n,d) figure(1)
margin(G) Mp_d 16/100 zeta_d 0.5 or
calculate from Mp_d PMd 100zeta_d
3 BW_d20 w_gcd BW_d0.7 Gwgcevalfr(G,
jw_gcd) PM piangle(Gwgc) phimax
PMdpi/180-PM alpha(1sin(phimax))/(1-sin(phimax
)) zlead w_gcd/sqrt(alpha) pleadw_gcdsqrt(alp
ha) Ksqrt(alpha)/abs(Gwgc) ngc conv(n, K1
zlead) dgc conv(d, 1 plead) figure(1)
hold on margin(ngc,dgc) hold off ncl,dclfeed
back(ngc,dgc,1,1) figure(2) step(ncl,dcl)
35
After design
Before design
36
Closed-loop Bode plot by
margin(ncl1.414,dcl)
Magnitude plot shifted up 3dB So, gc is BW
37
(No Transcript)
38
n50 d1/5 1 0 figure(1) clf margin(n,d)
grid hold on Mp 20/100 zeta
sqrt((log(Mp))2/(pi2(log(Mp))2)) PMd zeta
100 10 ess2ramp 1/200 Kvd1/ess2ramp Kva
n(end)/d(end-1) Kzp Kvd/Kva figure(2)
margin(Kzpn,d) grid GM,PM,wpc,wgcmargin(Kzp
n,d) w_gcdwgc phimax (PMd-PM)pi/180 alpha
(1sin(phimax))/(1-sin(phimax)) zw_gcd/sqrt(alph
a) pw_gcdsqrt(alpha) ngc conv(n,
alphaKzp1 z) dgc conv(d, 1
p) figure(3) margin(tf(ngc,dgc))
grid ncl,dclfeedback(ngc,dgc,1,1) figure(4)
step(ncl,dcl) grid figure(5)
margin(ncl1.414,dcl) grid
39
(No Transcript)
40
(No Transcript)
41
(No Transcript)
42
(No Transcript)
43
(No Transcript)
44
(No Transcript)
45
n50 d1/5 1 0 figure(1) clf margin(n,d)
grid hold on Mp 20/100 zeta
sqrt((log(Mp))2/(pi2(log(Mp))2)) PMd zeta
100 10 ess2ramp 1/200 Kvd1/ess2ramp Kva
n(end)/d(end-1) Kzp Kvd/Kva figure(2)
margin(Kzpn,d) grid GM,PM,wpc,wgcmargin(Kzp
n,d) w_gcdwgc phimax (PMd-PM)pi/180 alpha
(1sin(phimax))/(1-sin(phimax)) zw_gcd/alpha.25
sqrt(alpha) pw_gcdalpha.75
sqrt(alpha) ngc conv(n, alphaKzp1 z) dgc
conv(d, 1 p) figure(3) margin(tf(ngc,dgc))
grid ncl,dclfeedback(ngc,dgc,1,1) figure(4)
step(ncl,dcl) grid figure(5)
margin(ncl1.414,dcl) grid
46
(No Transcript)
47
(No Transcript)
48
(No Transcript)
49
(No Transcript)
50
(No Transcript)
51
(No Transcript)
52
(No Transcript)
53
(No Transcript)
54
(No Transcript)
55
(No Transcript)
56
(No Transcript)
57
(No Transcript)
58
(No Transcript)
59
(No Transcript)
60
(No Transcript)
61
(No Transcript)
62
(No Transcript)
63
(No Transcript)
Recommended
CrystalGraphics Presentations





























