
Stabilit - PowerPoint PPT Presentation
Title: Stabilit
1
Stabilité des systèmes linéaires continus
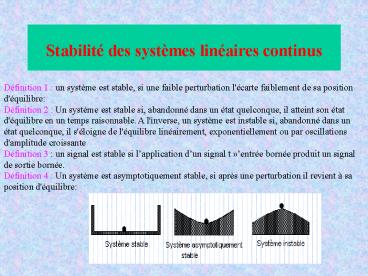
Définition 1 un système est stable, si une
faible perturbation l'écarte faiblement de sa
position d'équilibre Définition 2 Un système
est stable si, abandonné dans un état quelconque,
il atteint son état d'équilibre en un temps
raisonnable. A l'inverse, un système est instable
si, abandonné dans un état quelconque, il
s'éloigne de l'équilibre linéairement,
exponentiellement ou par oscillations
d'amplitude croissante Définition 3 un signal
est stable si lapplication dun signal
t entrée bornée produit un signal de sortie
bornée. Définition 4 Un système est
asymptotiquement stable, si après une
perturbation il revient à sa position
d'équilibre
2
Stabilité des systèmes linéaires continus
- La stabilité la plus intéressante pour
l'automaticien est celle d'un système en boucle
fermée. - On considère la structure générale dun système
asservi
L'analyse de stabilité décrite ici s'applique à
un système en boucle fermée dont on connaît la
fonction de transfert en boucle ouverte.
S'agissant d'un système linéaire, la fonction de
transfert en boucle ouverte peut être écrite sous
forme de quotient de polynômes multiplié par un
paramètre Ko variable.
3
Stabilité des systèmes linéaires continus
- FTBF
Réponse libre d'un système d'ordre n réponse
impulsionnelle
TL inverse
Conclusion Mathématiquement, on définit la
stabilité d'un système par la position de ses
pôles Est stable un système qui n'admet aucun
pôle à partie réelle positive.
4
(No Transcript)
5
Stabilité en fonction de la position des pôles du
système en boucle fermée
6
Étude de la stabilité des systèmes asservis
- En général, Les critères qui permettent d'évaluer
la stabilité d'un système asservi portent soit
sur la réponse harmonique en boucle ouverte Go(s)
(critère géométrique), soit sur le dénominateur
de la fonction de transfert en boucle fermée
Df(s) (critère algébrique).
7
CRITÈRES ALGÉBRIQUES
1-Critère de Routh On considère le polynôme
dénominateur du système en boucle fermée
Df(s)ansnan-1sn-1. a1sa0
Tableau de Routh (n lignes et (n1)/2 colonnes)
8
CRITÈRES ALGÉBRIQUES
Critère de routh
- Si tous les termes de la première colonne du
tableau de Routh sont strictement positifs, les
pôles sont à partie réelle négative, le système
étudié est stable. - S'il y a k changements de signe dans la première
colonne, k pôles ont une partie réelle positive,
le système étudié est instable. - Si tous les termes d'une ligne sont nuls, le
système étudié est en limite de stabilité.
9
CRITÈRES DE ROUTH
Exemples
Df1(s) s36s212s8 Df2(s)
2s34s24s12
3 1 12
2 6 8
1 64/6 0
0 8
3 2 4
2 4 12
1 -4 0
0 12
Pas de changement de signe 2 changements
de signe Système stable
Système instable
10
Application au système asservi
4 5 4.7 K
3 0.5 4K-1
2 14.7-40K K
1
0 K
11
CRITÈRES ALGÉBRIQUES
Conditions jusquà lordre 4
12
CRITÈRES ALGÉBRIQUES
2-Critère de Hurwitz Construction de la matrice
carrée de dimension n Elle contient les
coefficients du polynôme dès le deuxième, en
ordre décroissant disposés dans la diagonale
principale. Dans une colonne, les termes
supérieurs au terme de la diagonale contiennent
les coefficients suivants du polynôme en ordre
décroissant. Les termes inférieurs à la diagonale
contiennent les coefficients suivants du polynôme
en ordre croissant.
Le système linéaire d'ordre n est stable si les n
déterminants contenant le premier terme de la
matrice de Hurwitz sont positifs. Si on calcule
explicitement les déterminants jusqu'à l'ordre 4,
on retrouve les conditions dans le tableau
précédent
Remarque
On constate que ces deux critères ne donnent
qu'une réponse binaire stable ou instable, mais
ne permettent pas dapprécier sil est plus ou
moins proche de linstabilité (pas d'information
sur la qualité ou le degré de la stabilité).
13
CRITÈRES HURWITZ
Exemples
Df1(s) s36s212s8 Df2(s)
2s34s24s12
14
Critère
CRITÈRES GEOMETRIQUES
Critère de Nyquist
Le critère de Nyquist résulte de lapplication du
théorème de Cauchy à lanalyse de stabilité dune
BO. Théorème Le nombre Z de zéros instable du
dénominateur de 1Go(s) de la FTBF dun processus
asservi est égal au nombre P de pôles instable de
la FTBO Go(s) diminué du nombre de tour N du
diagramme de nyquist autour de (-1,0). ZP-N Si
PN le système en boucle fermée est stable,
dans le cas contraire le système est instable
15
CRITÈRES GEOMETRIQUES
Exemples
?
?
Système stable Système instable
16
CRITÈRES GEOMETRIQUES
Critère de Revers
Si le système en BO est à déphasage minimal cest
à dire sans pôles ni zéros à partie réelle
positive. Le système en BF est stable si, en
parcourant le lieu de Nyquist dans le sens des
pulsations croissantes, on laisse le point
(1,0) à gauche. Le système est instable si le
point (-1,0) reste à droite et juste oscillant si
on est sur le point (-1,0).
17
CRITÈRES REVERS
Exemple
18
CRITÈRE de REVERS
Plan de black
(1,0) est équivalent (180,0dB)
Un système linéaire de FTBF Gf(s) est stable si,
en parcourant le lieu de Black de sa réponse
harmonique en BO Go(s) dans le sens des
pulsations croissantes, on laisse le point
critique (180 0 dB )à droite.
19
CRITÈRE de REVERS
Exemple
20
CRITÈRE de REVERS
Plan de Bode
Un système asservi est stable si la courbe du
module de sa réponse harmonique en BO GO(j w)
coupe l'axe de module unité pour une phase
arg(GO(j w)) supérieure à 180.
Un système asservi est stable si la courbe du
module de sa réponse harmonique en BO coupe laxe
de module unité avec une pente supérieure à 2.
21
CRITÈRE de REVERS
Exemple
22
Marge de gain marge de phase
- Marge de gain
- La marge de gain permet d'indiquer la qualité de
la stabilité en exprimant la distance sur l'axe
réel par rapport au point critique 1.
L'intersection de la réponse harmonique avec
l'axe réel a lieu pour une pulsation notée w-p,
car la phase pour cette pulsation vaut -p - avec
- Marge de phase
- La marge de phase permet d'indiquer la qualité
de la stabilité en exprimant la distance
angulaire par rapport au point critique 1.
L'intersection de la réponse harmonique avec le
cercle unité a lieu pour une pulsation notée w1,
car le module pour cette pulsation vaut 1.avec
avec
23
Marge de gain marge de phase
24
Marge de gain marge de phase
25
Marge de gain marge de phase