
Topological Mapping using Visual Landmarks - PowerPoint PPT Presentation
Title:
Topological Mapping using Visual Landmarks
Description:
Map Updating: Not very good due to Steepest Descent algorithm. Title: Topological Mapping with Visual Landmarks Last modified by: Chi-Wei Chu Document presentation ... – PowerPoint PPT presentation
Number of Views:84
Avg rating:3.0/5.0
Title: Topological Mapping using Visual Landmarks
1
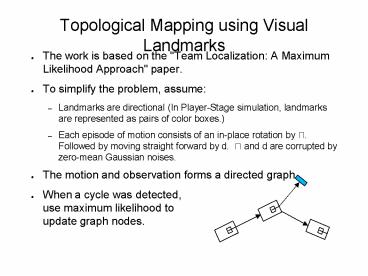
Topological Mapping using Visual Landmarks
- The work is based on the "Team Localization A
Maximum Likelihood Approach" paper. - To simplify the problem, assume
- Landmarks are directional (In Player-Stage
simulation, landmarks are represented as pairs of
color boxes.) - Each episode of motion consists of an in-place
rotation by ?. Followed by moving straight
forward by d. ? and d are corrupted by zero-mean
Gaussian noises. - The motion and observation forms a directed
graph. - When a cycle was detected, use maximum
likelihood to update graph nodes.
2
Problem One Cycle Detection
- Unlike team localization, in which each Robot can
be identified correctly, Landmarks with the same
visual cues (color pairs) are indistinguishable. - Cycle Detection, when observing a landmark the
robot has seen before - Backup old map.
- Assume a cycle is detected, update map
accordingly. - After updating the map, compute the average
negative-log-likelihood of updated graph edges.
If the average is below a threshold, keep the new
map. - Otherwise, restore the old map and add a new
landmark. - The problem is setting the threshold, which
depends on the motion model parameters.
3
Problem Two Gradient Descent
- The project uses the simplest Steepest Descent
algorithm to update the map. Which poses the
problem of slow converging. - Each node in the graph update itself to maximize
the total local likelihood of connecting edges.
The global maximum then is slow to reach. - Exploiting the algorithm
- When update motion nodes, ignore landmark nodes
that is newly observed and have not been updated
before, except the on which forms the cycle. - Applying better gradient descent algorithmmay
improve the result.
4
Result
- Cycle Detection
- Can detect cycles when observed a landmark the
robot have seen before. - Can distinguish similar landmarks that are placed
not too close to each other. - Map Updating
- Not very good due to Steepest Descent algorithm.
Recommended
CrystalGraphics Presentations




























