
Magnetic Sensors and Magnetic Actuators - PowerPoint PPT Presentation
Title:
Magnetic Sensors and Magnetic Actuators
Description:
Digital Compass Solution Combines a two axis MR Magnetic Sensors in order to detect the magnetic field. Use in wireless phone, vehicle compassing – PowerPoint PPT presentation
Number of Views:108
Avg rating:3.0/5.0
Title: Magnetic Sensors and Magnetic Actuators
1
Magnetic Sensors and Magnetic Actuators
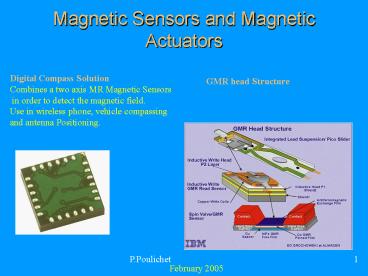
Digital Compass Solution Combines a two axis MR
Magnetic Sensors in order to detect the magnetic
field. Use in wireless phone, vehicle compassing
and antenna Positioning.
GMR head Structure
February 2005
2
Different types of Magnetic Sensors and Magnetic
Actuators
- Magnetic Sensors
- Inductive sensor
- Hall sensor
- Magnetoresistance (MR)
- Giant Magnetoresistance (GMR)
- FluxGate
- Magnetic Actuators
- Microinductance
- Actuators
3
Units
Magnetic Induction Tesla T Magnetic Induction
Gauss 10-4 T Magnetic field A.m-1. Magnetic
Field Oersted 1 A.m-1 4. pi.10-3 Oe Magnetic
flux 1T.m2 1 wb Permeability 4.pi.10-7
4
Characteristics of Magnetic Sensors
5
Inductive Sensors
Inductance to generate or to measure a magnetic
field
Model of the inductor
NDE (Non Destructive Evaluation)
Electroplating
- Applications
- NMR (Nuclear Magnetic Resonance)
- NDE, Isolator
ADuM1100
6
Hall Sensors Principle
Magnetic effect in a long sample lgtgtw
mobility
Drift velocity
carriers density
Current density
Magnetic Force
The magnetic force push carriers toward the upper
edge of the strips. Electricity behaves somewhat
like an incompressible fluid. It reacts
by developing an electric field, the Hall field
that counterbalances exactly the magnetic
pressure exactly.
7
Hall Sensors
The Hall electric field is
The Hall voltage is
Hall angle
Hall coefficient
The Hall voltage depend of
8
Hall Sensors Optimization 1
In order to increase the sensitivity, these
materials are use
Different sorts of errors for Hall sensors
- Scattering of the sensitivity of the Hall
voltage - Dependence of the Hall voltage with the
temperature - Inductive effect
- Offset, linearity
9
Hall Sensors Optimization 2
Linearity
Offset
Inductive effect
Magnetic sensor placed near the electronic in
order to correct the errors of the Hall Sensor.
10
Hall Sensors Applications
11
Magnetoresistance Principle
Magnetic effect in a short sample lltltw
Lorentz Force
Current density
As, Jp(B) are present on the two sides of this
equation, we can simplified
Jp(0) and B are perpendicular
The path of the current in the sample depend of
the external magnetic field. So the resistance
depend of the magnetic field.
12
Magnetoresistance
Dependence of R/R0 function of B
This type of sensor are not largely use
because The characteristics of the
magnetoresistance anisotropic are better.
InSb Antimoine dIndium NiSb Antimoine de
Nickel
13
Magnetoresistance Anisotropic
The anisotropy is obtained during the fabrication
of the material. It is applied a magnetic that
caused a preferred path for the magnetic
field. During the step of sputtering on a thin
film like Permalloy (FeNi 20 80, a magnetic
field is applied and this introduce a easy path.
This magnetic field introduce a easy axe and a
magnetization of the thin Film.
M Magnetization I Current H External magnetic
field
We will show that the resistance depend of the
angle j and q.
14
AMR
In order to simplify, we suppose that H is
applied in the direction of Hy.
and
If I is align with the easy axis
? -?. So,
- The resistance decrease with the magnetic field.
- The magnetic sensor is not linear.
- It is also impossible to determine the sign of
the magnetic field.
15
AMR with Barber poles
If I is align at 45 degrees
45 ? ?
16
AMR Realization
KMZ10A
17
GMR Principle
Sandwich with one ferromagnetic layer and one non
magnetic layer.
FeCr, FeNiAg, FeNiCu with thickness Fe 30 A et
Cr 9 A
With B
Without B
18
GMR Principle
With B
Without B
19
GMR
Realization (NVE)
20
Applications of AMR and GMR
Measurement of current
Detection of the speed
21
FluxGate Principle
The first winding is used to saturate the
magnetic Material. When the magnetic material is
saturate, there is no voltage across the second
winding. Measurement of delay introduce on the
voltage across the second winding will be help
to determine the value of the magnetic filed.
When there is no magnetic field, the gap between
the pulse is constant. When a magnetic field is
applied, the gap between the two pulses are
different.
22
FluxGate Realization
Configuration of the windings
The fluxgate is very sensitive. The realization
is complex but magnetic sensors with low
sensitivity have good perspective.
23
Magneto Impedance MI
Principle Use the skin effect
A current in a wire cause that the current
density is concentrate at the periphery of the
wire. So the impedance of the wire increase with
the frequency. A external magnetic field cause
also a dependence of the impedance with the
magnetic field. The purpose is to polarize the
wire at a frequency and the external magnetic
field cause a variation of the impedance.
Characteristics Polarization at 10 MHz. Range of
B from nT to µT. Sandwich of Layers FeCoSiB 40
µm thickness. Wire CoFe 30 µm diameter.
24
Magnetic Actuator
MAGMAS Magnetic micro actuator and system
A micro Inductance is used to generate a magnetic
field. This magnetic field act on a magnetic
layer in order to develop a force.
Micro Inductance Conductor (Al, Cu) deposed on a
substrate glass or Si. The size, the number of
turns give a inductance value. The thickness of
the conductor must be important. The
conductor need to be deposed by electroplating in
a molding. Current density increase with the
reduction of the size of the conductor (1000
A.mm-2 for a wire with a µm dimension).
Magnetic material Permalloy FeNi
electroplated. Magnet The magnet is placed under
the micro inductance. It is glued or
electroplated.
25
2D Optical Switch Array for Optical Routing
A mirror move when a current is applied on the
micro inductance. It reflect the light transmit
with the optics fiber. Under the membrane, the
permalloy is electroplated.
Under the coil, a magnet is placed. A pulse in
the coil shift the mirror. When the signal is
interrupted, the mirror stay in position. When
another pulse is applied on the coil, the mirror
move.
26
Bibliographie
About Hall Sensors Hall Effect Devices RS
POPOVICS (Library). About GMR Magnetic
Multilayers and Giant Magneto-resistance,
Springer, Surface Sciences (Library).
Recommended
CrystalGraphics Presentations





























