
Chapter 7: Production of Printed Circuit Boards
1 / 72
Title:
Chapter 7: Production of Printed Circuit Boards
Description:
Vapour Phase Soldering, continued Table 7.1: Physical properties of some primary vapours for reflow soldering. Other Soldering Methods Impulse (hot bar-, ... –
Number of Views:318
Avg rating:3.0/5.0
Title: Chapter 7: Production of Printed Circuit Boards
1
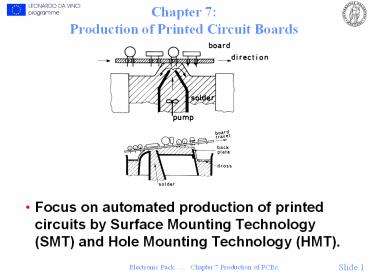
Chapter 7Production of Printed Circuit Boards
- Focus on automated production of printed circuits
by Surface Mounting Technology (SMT) and Hole
Mounting Technology (HMT).
2
Hole Mounting
- Axial components Sequencing and mounting
- Radial components Mounting
- DIP components Mounting
- Odd components Robot or hand mounting
Fig. 7.1The process for production of hole
mounted PCBs
3
Hole Mounting, continued
- Fig. 7.2 a) Schematic example of the most
efficient sequence of mounting the components of
a particular PCB.
4
Hole Mounting, continued
- Fig. 7.2 b) The principle of sequencing.
5
Hole Mounting, continued
- Fig. 7.3 Sequencing machine.
6
Hole Mounting, continued
- Fig. 7.4 Axial inserter with two mounting heads.
7
Hole Mounting, continued
- Fig. 7.5 Simplified process in the axial
inserter - 1) Cutting the components from the tape
- 2) Lead bending
- 3) - 4) Insertion
- 5) Cut and clinch
- 6) Return to starting position.
8
Hole Mounting, continued
- Fig. 7.6 DIP inserter.
9
Hole Mounting, continued
- Fig. 7.7 Manual mounting board with light guide.
10
Hole Mounting, continued
- Fig. 7.8 Wave soldering machine.
11
Wave Solder Process
- Apply adhesive by dispenser, screen printing or
pin transfer - Cure by heat or UV
- Turn board
- Wave solder
- Double-wave soldering machine common for SMT
- Not all SMD components suitable for wave soldering
12
Wave Soldering, continued
- Fluxing
- Pre-heating
- Soldering
- (Cleaning)
- Fig. 7.9
- a) Principle of foam fluxer.
- b) Control system for density and level of the
flux bath.
13
Wave Soldering, continued
- Fig. 7.10 a) Principle of wave soldering.
- b) The real shape of the wave.
14
Wave Soldering, continued
- Fig. 7.11
- a) Industrial in line cleaning machine.
- b) The principle of ultrasound and vapour
cleaning.
15
ElectroStatic Discharge (ESD) Precautions
- Fig. 7.12 An ESD protected working space. The
resistors R normally are 100 Kohm - 1 Mohm.
16
Surface Mounting
- Soldering by wave solder process or by reflow
process Fig. 7.13 Application of adhesive for
SMD mounting by - a) Screen printing
- b) Dispensing
- c) Pin transfer
17
Surface Mounting, continued
- Fig. 7.14 a) Shadowing in SMD wave soldering.
- b) Solder bridging on fine pitch package.
18
Surface Mounting, continued
Lambda wave
- Fig. 7.15 Double wave for SMD soldering. The
first is a turbulent wave that wets, followed by
a gentle lambda wave that removes superfluous
solder.
19
Surface Mounting, continued
- Fig. 7.16 Temperature profile during wave
soldering in a double wave machine.
20
Reflow Solder Process
- Print solder paste
- Mount components
- Dry solder paste
- Solder by heating to melting of paste
21
Solder Paste
- Consists of
- Solder particles ( 80 by weight)
- Flux
- Solvents and additives to give good printing
properties (rheology) - Typical mesh count in screen 80 per inch
- Area ratio Ao a2 /(ab)2
- Paste volume deposited V Vo Ao t
- "Solder ball test" for quality of solder paste
and solder process
22
Solder Paste, continued
- Fig. 7.17 Microphotograph of Multicore solder
paste type Sn 62 RMA B 3. The designation means
62 by weight of Sn, 35.7 Pb, 2, Ag, 0.3 Sb,
RMA flux, 75 µm average particle size, 85 metal
content, viscosity 400 000 - 600 000 centipoise.
23
Solder Paste, continued
- Fig. 7.18 Test of solder paste The paste is
printed through a circular opening with a
diameter of 5 mm, in a 200 µm thick stencil.
After reflow, the paste should melt into one
body, without any particles spreading out.
24
Screen Printing
- Woven screen (stainless steel or polyester) with
organic photosensitive layer, which is patterned
with holes (mask). - Metal stencil with etched or drilled openings.
- Polyester stencil with punched or drilled
openings. - Definition and accuracy depends on type, mesh
count, thickness, tension, squeegee, speed, etc.
Printing is a complex craft.
25
Screen Printing, continued
- Off-contact for screen printing, contact for
stencil. Two-step stencil for best definition. - The most advanced printers are fully automatic
with vision system for alignment.
26
Surface Mounting, continued
- Fig. 7.19 Detail of printing stencil (left) and
printing screen with fine line printing pattern.
27
Surface Mounting, continued
- Fig. 7.20 Detail of printing stencil with fine
pitch printing pattern Cross section of a
stencil etched from both sides, with an
acceptable, small amount of offset (40 x
magnification).
28
Surface Mounting, continued
- Fig. 7.21 Two steps printing stencil.
29
Surface Mounting, continued
- Fig. 7.22 Printing through 0.3 mm diameter holes
with Mylar stencil. To obtain the correct amount
of solder paste two or three small holes may be
used for each solder land.
30
Surface Mounting, continued
- Fig 7.23 a) Screen printer.
31
Surface Mounting, continued
- Fig. 7.23 b) The squeegee (DEK).
32
IR Soldering
- Fig. 7.24 a) IR furnace. Schematically with low
temperature "area emitter".
33
IR Soldering, continued
- Fig. 7.24 b) Industrial IR furnace.
34
IR Soldering, continued
- Infrared Soldering
- Plancks law
- W/A k1l-5 exp(k2/lT)-1)-1,
- where
- W/A emitted energy pr. second per m2 area
- k1 2 ?hc2
- h Plancks constant
- k2 hc/k
- k Boltzmanns constant
- Wavelength of max. radiation
- lmax k3/T
- Total radiated energy (Stefan Boltzmanns law)
- W/A esT4
- s Stefan Boltzmanns constant
- e emissivity (between 0 and 1)
35
IR Soldering, continued
- Fig. 7.25 Typical temperature profile for an IR
furnace.
36
Vapor Phase Soldering
- Newtons law
- dQ/dt hA (Tf -Ts)
- Where
- dQ/dt energy transferred pr. sec. (W)
- A total area
- h heat transfer coefficient
- Tf vapour temperature (boiling point)
- Ts PCB temperature
- PCB temperature approaches Tf asymptotically
- (Ts -To) (Tf -To)(1 -exp (-t/to))
37
Vapour Phase Soldering
- Fig. 7.26 a) Principle of in-line vapour phase
soldering machine.
38
Vapour Phase Soldering, continued
- Fig. 7.26 b) Industrial in-line vapour phase
soldering machine.
39
Vapour Phase Soldering, continued
- Fig. 7.27 Heat transfer coefficient for air and
fluorocarbons. Boiling fluorocarbons, at the
bottom, give 200 - 400 times more efficient heat
transfer than air.
40
Vapour Phase Soldering, continued
- Fig. 7.28 Temperature profile through in-line
vapour phase soldering machine.
41
Vapour Phase Soldering, continued
- Fig. 7.29 Chemical composition of fluoro carbons
for vapour phase soldering. Top The liquid
FC-5311 (3M) C14 F24 is derived from C14 H10.
Bottom The liquid LS 230 (Galden).
42
Vapour Phase Soldering, continued
- Table 7.1 Physical properties of some primary
vapours for reflow soldering.
43
Other Soldering Methods
- Impulse (hot bar-, thermode-) soldering
- Hot plate / hot band soldering (thick film
hybrid) - Hot air soldering
- Laser soldering
44
Thermode Soldering
- Fig. 7.31 Two types of thermodes for thermode
soldering.
45
Thermode Soldering, continued
- Fig. 7.32 Temperature profile for thermode
soldering.
46
Component Placement
- Automatic, dedicated pick-and-place machines
- Manual placement (prototypes, repair)
- Semi-manual (light guided table, etc.)
- Programmable robot
- Elements of Pick-and-Place Machine
- Board magazine/feeder system
- Mounting head(s) (with interchangable grip tools)
- Programming/control unit
- Component "storage" and feeder
- (Vision system)
47
Component Mounting
- Fig. 7.33 SMD pick-and-place machine
(Siemens).The mounting head may also include an
electronic vision system for very accurate
placement of fine pitch components.
48
Component Mounting, continued
- Fig. 7.34 a) Mechanical gripper in a pick-and
place machine. b) Detail of the component tape
when a component is in position for picking.
c) Vibration feeder.
49
Component Mounting, continued
- Fig. 7.35 Fuji CP-II pick-and-place machine. The
machine has magazine for over 100 types of small
components, nominal speed up to 15 000 components
per hour, placement accuracy 0.10 mm. It has a
rotating head with 12 positions, bottom figure,
and two alternative tools at each position. There
are components at all 12 positions at any time,
with a separate operation being performed. A CCD
camera shows the accurate position and
orientation on a CRT screen (Fuji).
50
Component Mounting, continued
- Fig. 7.36 Philips large hardware controlled
pick-and-place machine.
51
Solder faults
- Fig. 7.38 Small SMDs standing on edge due to the
"Manhattan-" or "tombstone-" effect.
52
Robot System for Placement
- Advantages
- Flexibility Can handle most odd component types
and boards, in low and high volumes - Uniform quality
- High placement accuracy ( 0.02 mm)
- Non-manned operation (over night)
- Can work in hostile environments
- Tests and controls can be included in placement
operation by special sensors on robot
53
Robot Mounting
- Fig. 7.39 Example of a programmable placement
robot for electronics The SCARA robot.
54
Robot System for Placement
- Must be carefully considered
- Cost, including the external equipment, fixtures,
transport system - Lower capacity than Pick-and-Place
- Requires careful planning, and often much
dedicated surrounding equipment
55
Robot Mounting, continued
- Fig. 7.40 The main components of a robot system.
56
Robot System Components
- Manipulator
- Learning unit
- Control unit
- Types of Manipulator Coordinate Systems
- Cartesian
- Cylindrical (including "Scara")
- Spherical
- "Human-like"
57
Robot Mounting, continued
- Fig. 7.41 Types of robot arms a) Cartesian
motion. b) Cylindrical. c) Spherical. d)
"Human like". The SCARA robot is a special
version of the cylindrical type.
58
Robot System Components, continued
- Programming
- "Lead-and-learn
- "Jog-and-learn
- "Synthetic programming"
59
Robot Mounting, continued
- Fig. 7.42 Multi gripper head.
60
Robot Uses in Electronics
- Production
- Component placement
- Production of parts (coils, cables,....
- Board feeding
- Handling of boards, components in testing
- Automatic trimming in test
- Parts assembly for board, rack, chassis, etc.
- Screw and glue operation
- Soldering, welding
- etc.
61
Robot Mounting, continued
- Fig. 7.43 Robot cell for electronic component
placement (Adept).
62
Types of Boards SMD and Mixed Assembly
- SMD side A
- SMD side A and hole components side B
- SMD side A and B
- SMD both sides, hole components side B
63
Process Sequences
- Fig. 7.44 a -d) Process sequences for boards
with different types of components on the two
sides. - The steps marked "For all processes" on figure a)
are not repeated on the other figures.
64
Process Sequences
- Fig. 7.44 a -d) Process sequences for boards
with different types of components on the two
sides. - The steps marked "For all processes" on figure a)
are not repeated on this figure.
65
Process Sequences
- Fig. 7.44 a -d) Process sequences for boards
with different types of components on the two
sides. - The steps marked "For all processes" on figure a)
are not repeated on this figure.
66
Process Sequences
- Fig. 7.44 a -d) Process sequences for boards
with different types of components on the two
sides. - The steps marked "For all processes" on figure a)
are not repeated on this figure.
67
Board Testing
- Functional test
- "In-circuit" test
- NB Good designs use one-sided testing
- Test jigs
68
Testing of PCBs
- Fig. 7.45 Two methods for single sided test of a
board with components on both sides.
69
Testing of PCBs
- Fig. 7.46 Bed-of-nails test fixture.
70
Testing of PCBs
- Fig. 7.47
- a) Detail of single sided test fixture.
- b) Double sided fixture.
71
Testing of PCBs
- Fig. 7.48 Two types of test pins.
72
Testing of PCBs
- Fig. 7.49 Unacceptable testing. The test point
should be on the Cu foil on the board, not on the
component lead.
Recommended
CrystalGraphics Presentations





























