
Higherway Transport Research Vehicle Design - PowerPoint PPT Presentation
1 / 7
Title:
Higherway Transport Research Vehicle Design
Description:
Higherway Transport Research Vehicle Design Skyhook ferry system requires special vehicles - Baz carries 1 Pheasant or Quail on elevated guideways – PowerPoint PPT presentation
Number of Views:65
Avg rating:3.0/5.0
Title: Higherway Transport Research Vehicle Design
1
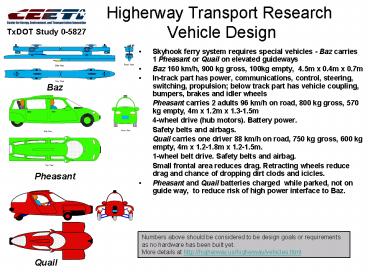
Higherway Transport Research Vehicle Design
- Skyhook ferry system requires special vehicles -
Baz carries 1 Pheasant or Quail on elevated
guideways - Baz 160 km/h, 900 kg gross, 100kg empty, 4.5m x
0.4m x 0.7m - In-track part has power, communications, control,
steering, switching, propulsion below track part
has vehicle coupling, bumpers, brakes and idler
wheels - Pheasant carries 2 adults 96 km/h on road, 800 kg
gross, 570 kg empty, 4m x 1.2m x 1.3-1.5m - 4-wheel drive (hub motors). Battery power.
- Safety belts and airbags.
- Quail carries one driver 88 km/h on road, 750 kg
gross, 600 kg empty, 4m x 1.2-1.8m x 1.2-1.5m. - 1-wheel belt drive. Safety belts and airbag.
- Small frontal area reduces drag. Retracting
wheels reduce drag and chance of dropping dirt
clods and icicles. - Pheasant and Quail batteries charged while
parked, not on guide way, to reduce risk of high
power interface to Baz.
Baz
Pheasant
Numbers above should be considered to be design
goals or requirements as no hardware has been
built yet. More details at http//higherway.us/hig
herway/vehicles.html
Quail
2
Higherway Transport Research Infrastructure
Design
- Suspended monorail - track encloses power bar and
running surfaces. - Y-section tracks accommodate in-vehicle switching
- Arterials have acceleration tracks to enable
constant 160 km/h speed on through tracks - Little effect on present infrastructure because
of small size and elevated guideways, relatively
low power vehicles. - Utility duct can carry power and communication
cables, lightweight utilities safe from weather,
reduce visual clutter - Same guideway carries captive passenger vehicles
same carriers (Baz) carry cargo (Owl) and
wheelchair (Pelican) pods - Guideway footprint 1 sq. m every 22m, skyprint 2m
for two-track arterial. Stop/landing footprint
56m x 8m for 4m vertical clearance. - 1-ton gross vehicle weight limit accommodates
0.6-ton cargos, 2-passenger dualmode vehicles - Factory-built track sections, cross arms, support
poles. - Foundations like those for traffic signal light
poles.
- Supporting Document/Reports
- See http//higherway.us/higherway/guide way.html,
and http//advancedtransit.org/doc.aspx?id1015 - Preliminary design subject to change - there is
no hardware yet
3
Higherway Transport Research Control System
Strategy
- Make enough profit to pay for needed expansion of
grid network to limit congestion - Congestion may be at entry to mate with Bazs at
landings. Limited number of Bazs will keep
congestion off elevated guide ways - Placement of landings at ground-level PAT stops
in large parking lots in suburbs will help keep
congestion off streets. - Drivers control Pheasants and Quails on streets.
Bazs are automated, including mate/demate. - Three control levels - Baz vehicle computers,
local traffic control computers, central routing
and billing computer - Pre-programmed default destinations save drivers
time - Not tested by Higherway - PAT control systems
have been simulated and tested in model and
full-scale demonstrations (Aerospace, Cabintaxi,
Morgantown PRT, PRT 2000)
- Supporting Document/Reports
- Fundamentals of Personal Rapid Transit by Irving
et.al. - Transit System Theory by Anderson
- http//higherway.us/higherway/control.html
4
Higherway Transport Research Power / Energy
Strategy
- Guideway power comes from local power grid with
strategically placed backup generators for power
failures - Peak guideway loads during commuter rush hours,
minimum at night when Bazs carry Owl cargo pods.
Peak battery recharge loads for Pheasants and
Quails mid day when parked, night when parked. - Baz picks up unregulated 600-750 VDC from
powerbar in track. Power return through track. - No range limit on guideway, Pheasant Quail
off-guideway range limited by battery technology,
owners' needs and preferences. - Low aerodynamic drag, low weight, non-stop on
guide way reduce energy needs
Commuter Cars Tango
- Supporting Document/Reports
- http//www.commutercars.com/
- http//corbinsparrow.com/index.html
Corbin Sparrow
5
Higherway Transport Research Check-in /
Check-out Strategy
- Pheasant and Quail have vehicle sensors and
computer to verify vehicle is ready to mate to
Baz. - If mating to Baz fails or it is rejected for
other reasons the driver must exit the landing - Operational control transfers from dualmode
vehicle to Baz on landing ramp when wheels
retract - Baz has in-vehicle switches for merge/diverge on
guideway. Drivers control Pheasants and Quails on
ground. - Landing throughput is too low to cause congestion
at exits, but is likely to cause queues at
entrances (off guideway).
- Supporting Document/Reports
- http//higherway.us/higherway/control.html
6
Higherway Transport Research Cost / Benefits
- Guideway cost goal 1 million per lane-km for
manufacturing and construction - Track through-put capacity 3600 vehicles per
hour, 5000 people per hour, or 2000 tons freight
per hour (freight not dualmode) - Landing throughput 120 vehicles/hour
- 160 km/h arterial speed with 1/2 s headway
- Prefer infrastructure financed like present gas,
power, communications utilities - Pheasants and Quails owned by users and rental
companies, Bazs owned by PAT system
company/agency - Vehicle costs expected to be similar to present
battery powered cars when produced in sufficient
quantity - Users will like system due to time and fuel
savings
Preliminary estimates - no hardware yet See
http//advancedtransit.org/doc.aspx?id1015.
7
Higherway Transport ResearchDevelopment Status
- 50 million to 1 billion to reach technology
maturity (estimate dependent on size of
development organizations, location, definition
of maturity) - In preliminary design and technology development
stage for last eight years - Expertise needed from motor designers, civil,
electrical, mechanical,control software, safety
engineers, entrepreneurs, etc. - Nearly all of design is unproven but much is
similar to other proven technology. - Design of Y-section track sections at left is an
example of solving switching problem of suspended
monorails - Technology being advanced by other programs and
competitors could be used to lower development
cost - example sensors and software from DARPA
autonomous vehicle challenge.
- Supporting Document/Reports
- http//higherway.us/higherway/mission.html
- http//www.darpa.mil/grandchallenge/index.asp
- http//www.conductix.us/productpage.cfm?Ids294
Recommended
CrystalGraphics Presentations





























