
Kinematics
1 / 25
Title: Kinematics
1
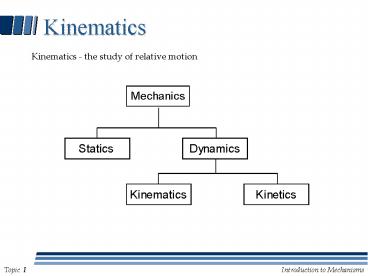
Kinematics
Kinematics - the study of relative motion
2
Mechanisms
- Mechanism - a mechanical device that transfers or
transforms motion or energy from an input source
to an output - Examples
- Linkages
- Gears
- Cams
3
Kinematic Diagrams
Kinematic skeleton diagrams are used to easily
describe mechanism geometry.
4
Kinematics Roadmap
5
Four-bar Linkage
Four-bar Linkage - simplest close-loop mechanism
has four links and four joints.
6
Slider-Crank Linkage
Slider-Crank Linkage - when a link of a four-bar
mechanism is replaced with a slider.
- Examples
- Piston, connecting rod, and crank shaft
- Can crusher
7
Linkage Synthesis
- Analysis - analysis is determining motion of a
mechanism with known geometry - Synthesis - determining linkage geometry to
perform a specified task
8
Relative Motion
- Relative motion - motion of one point with
respect to another point. - Absolute motion - motion of a point with respect
to ground (the fixed link) - Reference frames
- Examples
- You
- Coupler curves
9
Types of Motion
- Pure Rotation one point is fixed with respect to
the reference frame - Pure Translation all points on a body have
parallel paths - Complex Motion both rotation translation
10
Degrees of Freedom
- Degrees of Freedom (DOF) - the number of
independent inputs required to define the
position of all links of a mechanism
11
Link Types
12
Joint Types
13
Kinematic Pairs
- Lower Pairs - joints that allow one degree of
freedom of relative motion. Pin (revolute)
joints, sliders (prismatic joints), and screws
are examples.
- Higher Pairs - allow two degrees of freedom of
relative motion between mating links. Cams are
examples
14
Degrees of Freedom Cont.
15
Grueblers Equation
- Grueblers Equation
F 3(n-1) - 2f1 - f2
Where n number of links f1 number of lower
pairs f2 number of higher pairs
16
Degrees of Freedom Examples
n f1 f2 F
n f1 f2 F
17
Equivalent Mechanisms
n f1 f2 F
n f1 f2 F
18
Degrees of Freedom Cont.
Different values of DOF mean different things. F
0 Structure F lt 0 Statically indeterminate
structure F ? 1 Mobility is allowed
n f1 F
19
Exceptions
- Grueblers equation has some exceptions to watch
for. These usually involve special geometry or
redundant constraints.
20
Six-bar Chains
Watt chain - the ternary links are connected
Stephenson chain - the ternary links are
separated by binary links
21
Linkage Transformation
Transformation of a crank-rocker to a slider-crank
22
Mechanism Inversions
Mechanism inversions are produced by making
another link the fixed link.
23
Grashofs Law
- Grashofs Law - for at least one link to have
full rotation
Where s - the length of the shortest link l -
the length of the longest link p and q - the
lengths of the other links
24
Classifications
25
Change-point Mechanisms
- If s l p q, the mechanism has a change
point where all links are colinear. The mechanism
may go into another configuration at the change
point.
Recommended
CrystalGraphics Presentations





























