
Diapositiva 1
1 / 5
Title: Diapositiva 1
1
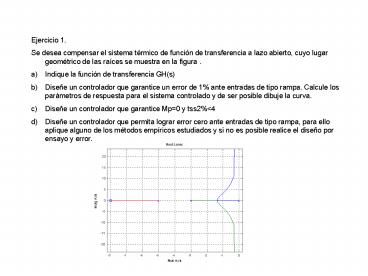
- Ejercicio 1.
- Se desea compensar el sistema térmico de función
de transferencia a lazo abierto, cuyo lugar
geométrico de las raíces se muestra en la figura
. - Indique la función de transferencia GH(s)
- Diseñe un controlador que garantice un error de
1 ante entradas de tipo rampa. Calcule los
parámetros de respuesta para el sistema
controlado y de ser posible dibuje la curva. - Diseñe un controlador que garantice Mp0 y
tss2lt4 - Diseñe un controlador que permita lograr error
cero ante entradas de tipo rampa, para ello
aplique alguno de los métodos empíricos
estudiados y si no es posible realice el diseño
por ensayo y error.
2
- Ejercicio 2.
- A continuación se presenta el lugar geométrico de
las raíces obtenido para el lazo de control de un
intercambiador de calor donde la función de
transferencia de lazo abierto es 10/(s3)(s5).
Además, se presenta la curva de respuesta (T(t))
del sistema a lazo abierto al ser perturbado con
un escalón unitario en F1(s). - Calcule los parámetros de un controlador PI y un
controlador PID utilizando algún método empírico.
Calcule los polos dominantes de lazo cerrado en
cada caso e indique los valores aproximados de
los parámetros de respuesta. - Realice un bosquejo del LGR del sistema
controlado para cada caso y explique como será el
comportamiento del sistema para distintos valores
de ganancia
3
- Ejercicio 3.
- A continuación se presenta el lugar geométrico de
las raíces obtenido para el lazo de control de un
intercambiador de calor donde la función de
transferencia de lazo abierto es 10/(s3)(s5).
Además, se presenta la curva de respuesta (T(t))
del sistema a lazo abierto al ser perturbado con
un escalón unitario en F1(s). - Calcule la ganancia del controlador proporcional
utilizando el método de sintonización que pueda
aplicarse con la información disponible. Explique
como se aplica el método de sintonización en este
caso - Con ese controlador, cómo será el
comportamiento del sistema en cuanto a precisión,
estabilidad absoluta, relativa y velocidad de
respuesta ante un escalón de referencia? - Diseñe por ensayo y error un controlador que
garantice error igual a cero ante entradas
escalón y analice el LGR del sistema controlado.
4
- Ejercicio 4.
- A continuación se presenta el lugar geométrico de
las raíces obtenido para el lazo de control de un
motor donde la función de transferencia de lazo
abierto es 10/(s2)(s5)(s3)(s10). - Calcule la ganancia del controlador proporcional
utilizando el método de sintonización que pueda
aplicarse con la información disponible. Explique
como se aplica el método de sintonización en este
caso - Con ese controlador, cómo será el
comportamiento del sistema en cuanto a precisión,
estabilidad absoluta, relativa y velocidad de
respuesta ante un escalón de referencia? - Diseñe por ensayo y error un controlador que
garantice error igual a cero ante entradas
escalón y analice el LGR del sistema controlado.
5
- Ejercicio 5.
- A continuación se presenta el lugar geométrico de
las raíces obtenido para el lazo de control de un
motor donde la función de transferencia de lazo
abierto es 10/(s2)(s5)(s3)(s10). - Calcule los parámetros de un controlador PI y un
controlador PID utilizando algún método empírico.
Calcule los polos dominantes de lazo cerrado en
cada caso e indique los valores aproximados de
los parámetros de respuesta. - Realice un bosquejo del LGR del sistema
controlado para cada caso y explique como será el
comportamiento del sistema para distintos valores
de ganancia
Recommended
CrystalGraphics Presentations





























