
3.4 Transient response analysis of the linear control system
1 / 21
Title:
3.4 Transient response analysis of the linear control system
Description:
system to a second-order or a first-order system. 12/23/09. 18. Example 3.1 ... So we make: So we have: Example 3. 3: (a test of the master entrance examination) ... –
Number of Views:677
Avg rating:3.0/5.0
Title: 3.4 Transient response analysis of the linear control system
1
3.4 Transient response analysis of the linear
control system
3.4.1 Time-Domain transient performance
specification of the linear control systems.
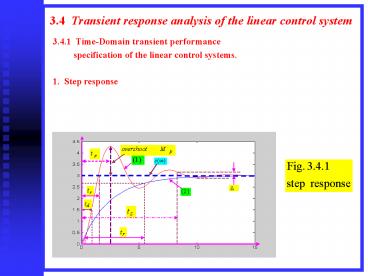
1. Step response
The step response of the general control
systems is shown in Fig.3.4.1
2
- 2. The performance criteria
3
- 3.4.2 step response of the first-order systems
1. What is the first-order system?
The system could be described by a first-order
differential equationthe first-order system .
2. Why and How to research the first-order system?
Why---many actual systems can be expressed as a
first-order system.
How---solve C(t) and analyze C(t).
3. The step response of the first-order system
Typical first-order system
4
- 3.4.2 step response of the first-order systems
The step signal r(t)A01(t)
5
- 3.4.2 step response of the first-order systems
performance
6
3.4.3 step response of the second-order systems
1. What is the second-order system?
- The system could be described by a
second-order differential equation.
2. Why and how to research the second-order
system?
Why---many actual systems can be expressed as a
second-order system.
How---solve C(t) and analyze C(t).
3. step response of the typical second-order
systems
Here
7
3. step response of the typical second-order
systems
Here
Three case
1) ?gt1 over damping case
8
2) ?1. critical damping case
9
3) 0lt?lt1. Under damping case
10
4) ?0. Zero or negative damping case
system is unstable
Poles distribution
Unit step response
11
4. The transient performance analysis of the
second-order system
? Rise time tr
? Peak time tr
12
? Setting time ts
? maximum overshoot sp
Note
13
3.4.5 The response of the linear systems for
other input signals
In terms of the theory in course 3.1.4
14
(No Transcript)
15
3.5 The unity-step response analysis of the
nth-order control systems
16
Discuss the unit step response
We have
17
We can use the dominant poles to approximate
a nth-order system to a second-order or a
first-order system.
18
- Example 3.1
(a test of the master entrance examination)
A temperature meter can be regarded as a
inertial component. If we use the meter to
measure the constant water temperature, it need 2
minute to be 0.98 of the actual temperature. If
we use the meter to measure the water temperature
varying linearly with time t, ess?
Solution
The transfer function of the temperature meter is
Measuring the constant water temperature can
be regarded as inputting a step signal to the
temperature meter, we have
Measuring the water temperature varying
linearly with time can be regarded as inputting a
ramp signal to the temperature meter, we have
19
Example 3. 2
(A test of Master Entrance Examination, Qinghua
university, 15 marks)
typical 2th-order system, unity feedback, the
unit step response is shown in following
figure. 1. Determine the open-loop transfer
function of the system. 2. Determine the
transfer function of the cascade compensation
device, to make the steady-state error ess0 for
the unit ramp input.
Solution
20
But the closed loop system cant be stable.
So we make
Example 3. 3
(a test of the master entrance examination)
A typical 2th-order system, unity feedback,
the unit step response is
Determine the open-loop transfer function of the
system.
21
- Solution
For the over damping case of the typical
secondorder system
The open-loop transfer function of the system
Recommended
CrystalGraphics Presentations





























