Writing Skills - PowerPoint PPT Presentation
1 / 103
Title:
Writing Skills
Description:
Geodesy is a 21st Century science making use of the most advanced ... Geodesists use new satellite navigation and positioning capabilities to survey the ... – PowerPoint PPT presentation
Number of Views:57
Avg rating:3.0/5.0
Title: Writing Skills
1
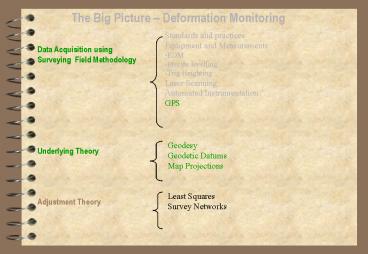
The Big Picture Deformation Monitoring
- Standards and practices
- Equipment and Measurements
- EDM
- Precise levelling
- Trig Heighting
- Laser Scanning
- Automated Instrumentation
- GPS
Data Acquisition using Surveying Field
Methodology
Geodesy Geodetic Datums Map Projections
Underlying Theory
Least Squares Survey Networks
Adjustment Theory
2
451-200 Geomatics Science 2
- The Global Positioning System, Geodesy and Map
Projections
3
The Global Positioning System
The Navstar Global Positioning System (GPS) is
an all-weather, space based navigation system
developed by the Department of Defense to satisfy
the requirements for the military forces to
accurately determine their position, velocity and
time in a common reference system anywhere on or
near the Earth on a continuous basis
4
GPS
- has revolutionised traditional surveying
techniques - intervisibility between stations not required
- independent of weather conditions
- can operate day or night
- highly accurate
- quick and easy to use
- baselines of 100s of km in length possible
- economic advantage
5
Applications of GPS
- geodetic surveying (position and height)
- GIS data capture
- in-car navigation systems
- ship and aircraft navigation
- geophysical surveys
- recreational uses
6
System Availability
- GPS is free
- Anyone with a receiver can pick up GPS signals
anywhere in the world - Military system - downgraded by the Americans
7
GPS Downgrading
- Selective Availability(SA)
- Anti-spoofing(AS)
8
The Space Segment
- 24 satellites
- 12 hour, geosynchronous orbits
- 20,000km
- Block I, Block II, Block IIR
- atomic clocks - key to the systems accuracy
- spread spectrum signal - less subject to
intentional jamming - transmit within the L band of the frequency
spectrum, microwaves - L1 - 1575.42MHz
- L2 - 1227.60MHz
9
The Space Segment
- Dual frequencies eliminate the effect of the
atmosphere - major source of error - modulated with 2 pseudo random noise codes
- coarse acquisition code
- precise code
- data message
- satellite identification number PRN codes
- 4-8 satellites can be observed anywhere on the
Earth above 15o
L1
L2
10
The Space Segment
- C/A code allows access to the standard
positioning service (SPS) - positioning accuracy of around 100m,
- P code allows access to the precise positioning
service (PPS) - positioning accuracy of around 15m
- C/A code gives approximate position, it assists
with acquisition of the P-code for more precise
positioning
11
Denial of Accuracy and Access
- Selective Availability (SA)
- dithering of the satellite clock frequency
- affects one receiver operation - eliminated by
differencing between receivers - expected to be removed within the next 10 years
- Truncation of the transmitted navigation message
so that the coordinates of the satellites cannot
be accurately computed - Anti Spoofing(AS) - turn off the P code of invoke
an encrypted Y code. Denies the P code to all
but authorised users
12
The Control Segment
- Operational control System (OCS) - master control
station, worldwide monitor stations and ground
control stations - stations track the GPS satellites
- predict satellite orbits
- satellite clock corrections computed
- updated in the data message every hour
- master control station - Colorado
- calculates satellite orbit and clock parameters
from the monitor stations - results passed to ground control stations for
upload to the satellites
13
The Control Segment
- 5 monitor stations globally
- orbit determination using precise cesium clocks
and P code receivers - private monitoring networks also exist5 monitor
stations globally - 3 ground control stations collocated with the
monitor stations - mainly consist of ground antennas
- communication links to the satellites
14
The User Segment
- Military - Department of Defense
- Civilian
- high precision - geodetic surveying
- low precision - leisure activities, hiking,
yachting
15
Calculation of Position
- GPS positioning based on geometry
- Resection
- 4 satellites
r
rs
rr
16
Calculation of Position
- Using a single receiver accuracy affected by
- accuracy of satellite position
- accuracy of the pseudorange measurement
- satellite geometry
17
GPS coordinates are computed in a Cartesian (XYZ)
coordinate system on the WGS84 reference
system. To mean anything to us these
coordinates must be converted (1) to geodetic
coordinates in WGS84 (2) from WGS84 to AGD
geodetic coordinates (on ANS66) (3) from AGD
coordinates to AMG
18
GDA
- ANS66 change to GRS80 (WGS84)
- GDA will be fully compatible with GPS
- Transformations from WGS84 to AGD will become
unecessary
19
GPS Time
- Time very important in GPS
- Uses a global timeframe - universal time (UT)
- Melbourne is 10 hours ahead of UT
- in reality GPS uses its own atomic time system
20
Drawbacks of GPS
- no good in tunnels, underwater or in buildings
- need clear sky to see satellites
- gives out coordinates in WGS84, must be
transformed to local datum - produces ellipsoidal not orthometric heights
21
GPS hardware and mission planning
- GPS receivers
- signal tracked (C/A and/or P code) L1 and/or L2
carrier phase. - number of channels
- realtime or post processed
- static/kinematic
- data transmission link
- size/portability
- power source
- price
- time to first fix
- update rate
22
GPS hardware and mission planning
- GPS antennas
- used to receive signals from GPS satellites
- designed to give high SNR
- designed to reduce multipath
- size depends on application
- antenna phase centre must be stable
23
GPS Survey
- Field Reconnaissance
- reconnaissance saves time, effort and money in
the long term - similar to standard surveying reconnaissance
except sky visibility is important - need maps, plans, site descriptions
24
Site Evaluation
- find the point
- check for obstructions - elevation mask
- multipath
- construct visibility diagram
25
GPS Survey Planning
- What accuracy do you require
- how many receivers
- single or dual frequency
- what type of receivers (preferably same types of
antenna and receivers)
26
GPS Survey Planning
- how long will you observe
- 1-10km (30-60 minutes)
- 10-20km (60-120 minutes)
- when should you observe
- satellite avaiability plot
- DOP Plot
- data sampling rate
- logistics
27
GPS Field Practice
- Code range vs carrier phase
- code ranges accurate to 1m, carrier phase to 1mm
- code unambiguous, carrier phase ambiguous
- real time vs post processing
- static vs kinematic - kinematic less precise
- point positioning vs relative positioning
- point positioning - coordinates of a single point
determined using a single receiver (almost always
code) - relative positioning - combining simultaneous
observations from two receivers to give the
position of one receiver relative to the other
(code or carrier phase) - code relative positioning is usually called
differential GPS
28
Relative GPS
- solves for the vector between two receivers
- for short baselines (lt30km) most errors cancel
- A GPS baseline is a 3D vector between two points
- the coordinates of the unknown station are solved
relative to a control station - require good control
29
GPS Accuracies
- kinematic positioning (code) 100m
- static positioning (code) 5 - 20m
- kinematic relative positioning (code -
DGPS) 3- 5m - kinematic relative positioning (phase) lt10cm
- static relative positioning (code) 0.5 - 1m
- static relative positioning (phase) 0.01 -
1ppm
30
GPS Field Procedure
- Make sure you have all your equipment and
scheduling sheets and field teams are
synchronised - on arrival at the point
- set up precisely over the point
- ensure everything is level
- check orientation of antenna
- check receiver configuration
31
Logging the Data
- check satellites available
- check and maintain power supply
- check satellite visibility
- measure antenna, vertical height
32
GPS Data Processing
- computes the coordinates
- user must be alert to what is going on
- look for QA
- software inputs
- satellite ephemerides
- measurements
- antenna heights
- coordinates of control points
- software output
- dX, dY, dZ
33
GPS Error Sources
- Code and phase pseudoranges affected by by
systematic errors, biases and random noise
34
Biases and Noise
- Systematic errors can be modelled and solved in
the observation equations - differencing between receivers eliminates
satellite specific errors - differencing between satellites eliminates
receiver specific errors - random noise contains actual observation noise
plus multipath effects
35
Other Space Positioning Systems
- GLONASS
- GALILEO
- EGNOS
- GNSS
36
- Introduction to Geodesy and Map Projections
Geodesy is a 21st Century science making use of
the most advanced space measurement and computer
technologies. A map projection is any
systematic arrangement of meridians and parallels
portraying the curved surface of the spheroid
upon a plane
37
- Definition of Geodesy
- Geodesy is the study of
- The size and shape of the earth
- The measurement of the position and motion
of points on - the earth's surface, and
- The configuration and area of large portions
of the earth's surface. - Geodesy serves as a foundation for the mapping
and referencing of all - geospatial data, it is a dynamic application of
scientific methods in support - of many professional, economic and scientific
activities and functions, - ranging from land titling to mineral exploration
from navigation, mapping - and surveying to the use of remote sensing data
for resource management - from the construction of dams and drains, to the
interpretation of - seismic disturbances.
38
Applications of Geodesy
Geodesists improve models to enable more precise
determination of satellite orbital positions.
They use radio astronomy to position the earth
and points on or above the earths surface in a
reference system based on quasars. Using
space-borne instruments, geodesists study
variations in mean sea level, mass transports
caused by atmosphere, ocean circulation, ground
water redistribution, and ice sheet
changes. Satellites are also used to mea-sure
earths gravity field and its temporal changes
and to study its role in climate change
phenomena and natural hazards. Geodesists use
new satellite navigation and positioning
capabilities to survey the land more accurately
and more economically to within a centimeter.
They use state-of-the-art navigation systems to
provide precise positions of science platforms
on board aircraft, ships, and satellites. Geodesy
plays an active role in the burgeoning geomatics
industry that includes the disciplines of land
surveying, photogrammetry, remote sensing,
hydrography, cartography, engineering surveying,
geographic information science, and geospatial
computing.
Ohio State University
39
Geodetic Surveying
- An accurate means of determining position and
height. - Geodetic survey is an effective means of
providing accurate position and height on the
earth's surface. Works that require geodetic
surveys for the accurate positioning of control
points are - Large mapping projects
- Tunnelling and laying of pipelines
- Precise control positioning for large
survey works
40
Shape of the Earth
- Over limited area treat earth as a plane - simple
- Sometime as as a sphere - spherical trigonometry
- geoid
- Forces generated by the Earths rotation
flatten the Earth into an ellipse
.
41
Relationship Between Different Surfaces
Earth An irregularly shaped planet we have to
work on. Geoid An equipotential surface (a
fancy way of saying the pull of gravity is equal
everywhere along the surface) which influences
survey measurements and satellite orbits. A
plumb bob always points perpendicular to the
geoid, not to the center of the earth.
Ellipsoid An ellipse which has been rotated
about an axis. This provides a mathematical
surface on which we can perform our
calculations. The shape of the ellipsoid is
chosen to match the geoidal surface as closely
as possible.
42
Relationship Between Different Surfaces
- AHD coincident with geoid for most practical
purposes - geoid departs from a geocentric sphere by 22km
and from an oblate geocentric spheroid, flattened
at the poles by 100m - All conventional survey measurements are made
relative to the geoid, but geodesists choose a
spheroid to approximate the geoid for data
reduction and subsequent mapping
43
(No Transcript)
44
(No Transcript)
45
Relationship between the Geoid and Ellipsoid
geoid - spheroid separation N h - H
H orthometric height approximated by AHD above
the geoid h spheroidal height above the
spheroid N geoid height above the spheroid
46
Deflection of the Vertical
- Instrument set up perpendicular to the geoid.
Because we work with the spheroid. Difference is
the deflection of the vertical. This can be
neglected if small.
47
Deflection of the Vertical
- deflection in the meridian is ve when deflected
to the north
48
The Best Fitting Spheroid
- the spheroid is deliberately chosen to be a best
fit to the geoid, so as to simplify survey data
reduction. This is achieved by minimizing x,h,N - 6.3m in geoid-spheroid separation 1ppm
horizontal scale error
49
Coordinate Systems
- Plane Coordinates
- local, possible arbitrary
- z axis vertical throughout
- right handed system
- bearings relative to y axis
- ignores shape of earth
- x,y,z
50
The most commonly used coordinate system today is
the latitude, longitude, and height system. The
Prime Meridian and the Equator are the reference
planes used to define latitude and longitude.
51
The geodetic latitude of a point is the angle
from the equatorial plane to the vertical
direction of a line normal to the reference
ellipsoid. The geodetic longitude of a point
is the angle between a reference plane and a
plane passing through the point, both planes
being perpendicular to the equatorial plane.
The geodetic height at a point is the distance
from the reference ellipsoid to the point in a
direction normal to the ellipsoid.
52
Cartesian Coordinate System
53
Map Grid Coordinates
- derived from geodetic coordinates
- transform 3D to 2D
- scale and line distortions present
- survey observables require corrections
- map projections
54
Geodetic Datums
NB Difference between spheroid and datum
- numerical or geometrical quantity or set of
quantities which serve as a reference or base for
other quantities - The adopted coordinates (after and adjustment of
measurements comprise the datum) - The spheroid is a simple geometrical reference
surface to which the coordinates are referred - horizontal or vertical, datums
- regional or global different best-fitting
reference spheroids have been defined in
different parts of the world because of the
undulating geoid. Eg. the Australian National
Spheroid.
55
Geodetic Datums
- consists of f, l or an initial origin the
azimuth for one line the parameters of the
reference ellipsoid and the geoid separation at
the origin. The deflection of the vertical and
geoid-spheroid separation are set to zero at an
origin point eg Johnson in Australia - geodetic latitudes and longitudes depend on both
the reference spheroid and coordinate datum - often the spheroid is implicitly linked to the
datum, so it has become common to use the datum
name to imply the spheroid and vice versa eg
WGS84 - the orientation and scale of the spheroid is
defined using further geodetic observations
56
Geodetic Datums
- Local/regional datum
- Approximates size and shape of the earth on a
local, regional scale - geometrical centre of the spheroid not
necessarily coincident with geocentre - well suited to surveying over the areas they were
defined for - inadequate for global satellite - surveying systems.
57
Regional Spheroids and Datums
- once the best-fitting spheroid is adopted, all
geodetic observations are reduced to this
spheroid, adjusted in a least squares sense,
which forms the geodetic datum.
eg the Australian Geodetic Datum (AGD) is based
on ANS
58
Global Spheroids and Datums
- satellite geodesy provides us with spheroids that
are geocentric, where their geometrical centre
corresponds with the Earths centre of mass since
the satellite orbits are close to the geocentre - orientation achieved by aligning its minor axis
with the Earths mean spin axis at a particular
epoch eg WGS84 - a modern global network of accurately coordinated
ground stations comprises a global datum called
the International Earth Rotation (IERS)
International Terrestrial Reference Frame (ITRF)
59
Global Spheroids and Datums
- ITRF is positioned relative to the geocentre
using a variety of space geodetic techniques,
such as Satellite Laser Ranging (SLR), Very Long
Baseline Interferometry (VLBI) and GPS. - The ITRF is considered to be a more reliable
datum than WGS84 and will form the backbone of
the GDA 10cm difference between them
60
Effect of Using Different Datums
- Datum and spheroid must be specified to define
horizontal position not just f, l - Without this information a single point can
refer to different positions
61
Map Projections
- Any systematic arrangement of meridians and
parallels portraying the curved surface of the
spheroid upon a plane
62
Map Projections
- The aim of a map projection is to represent the
Earths surface or mathematical representation of
the Earths surface on a flat piece of paper
with a minimum of distortion. - Recall
- Spheroidal Earth can be approximated to a plane
over small areas with minimal distortion - As the area of the spheroid becomes greater then
the distortion becomes greater
63
The Problem
P
Q
P
Y
?
?
Q
X
We can say that x f1(???) y f2(???)
Therefore, the coordinates on the plane have a
direct functional relationship with latitude and
longitude. It follows that should be a one to
one correspondence between the earth and the
map. However 1) some projections may not be able
to show the whole surface of the Earth. 2) some
points may be represented by lines instead of
points This is because the spheroid has a
continuous surface whereas a plane map must have
a boundary.
64
Projection surfaces
- developable surfaces
- geometric or mathematical
- gnomonic, stereographic, orthographic
65
Map projections are attempts to portray the
surface of the earth or a portion of the earth on
a flat surface. Some distortions of conformality,
distance, direction, scale, and area always
result from this process. Some projections
minimize distortions in some of these properties
at the expense of maximizing errors in others.
Some projection are attempts to only moderately
distort all of these properties.
Conformality When the scale of a
map at any point on the map is the same in any
direction, the projection is conformal.
Meridians (lines of longitude) and parallels
(lines of latitude) intersect at right angles.
Shape is preserved locally on conformal or
orthomorphic maps. Distance -
equidistant A map is equidistant
when it portrays distances from the center of the
projection to any other place on the map.
Direction - azimuthal A map preserves
direction when azimuths (angles from a point on a
line to another point) areportrayed correctly in
all directions. Scale
Scale is the relationship between a distance
portrayed on a map and the same distance on the
Earth. Area - equal-area When a map
portrays areas over the entire map so that all
mapped areas have the same proportional
relationship to the areas on the Earth that they
represent, the map is an equal-area map.
66
Map projections fall into four general classes.
Cylindrical projections result from projecting
a spherical surface onto a cylinder.
In the secant case, the cylinder touches the
sphere along two lines, both small circles.
When the cylinder is tangent to the sphere
contact is along a great circle
67
When the cylinder upon which the sphere is
projected is at right angles to the poles, the
cylinder and resulting projection are
transverse.
When the cylinder is at some other,
non-orthogonal, angle with respect to the
poles, the cylinder and resulting projection is
oblique.
68
Conic projections result from projecting a
spherical surface onto a cone.
When the cone is tangent to the sphere contact
is along a small circle.
In the secant case, the cone touches the sphere
along two lines, one a great circle, the other a
small circle.
69
Azimuthal projections result from projecting a
spherical surface onto a plane.
In the secant case, the plane touches the sphere
along a small circle if the plane does not pass
through the center of the earth, when it will
touch along a great circle.
When the plane is tangent to the sphere contact
is at a single point on the surface of the Earth.
70
The Universal Transverse Mercator UTM
The Universal Transverse Mercator projection is
actually a family of projections, each having in
common the fact that they are Transverse Mercator
projections produced by folding a horizontal
cylinder around the earth. The term transverse
arises from the fact that the axis of the
cylinder is perpendicular or transverse to the
axis of rotation of the earth. In the Universal
Transverse Mercator coordinate system, the earth
is divided into 60 zones, each 6 of longitude in
width, and the Transverse Mercator projection is
applied to each zone along its centerline, that
is, the cylinder touches the earth's surface
along the midline of each zone so that no point
in a given zone is more than 3 from the location
where earth distance is truly preserved.
- unit of length is the metre
- an ellipsoid is adopted as the shape and size of
the earth - coord obtained by a TM of f and l of points on
the ellipsoid - the true origin of coords is the intersection of
the equator and the central meridian of a zone - a central scale factor of 0.9996 is superimposed
on the central meridian - for points in the northern hemisphere, E and N
coords are related to a false origin 500,000m W
if the true origin and for points in the southern
hemisphere, E and N are related to a false origin
500,000m W and 10,000,000m S of the true origin - the projection has 60 zones, 6o wide in
longitude, beginning with zone 1 having a central
meridian of 177oW, numbered consecutively
eastwards, ending with zone 60 with a central
meridian of 177oE - the latitude extent of each zone is 80oS and 84oN
71
The Universal Transverse Mercator UTM
72
AMG and MGA
- The AMG and MGA are both systems of rectangular
coordinates based on TM projections of f and l
related to the AGD and GDA. - closely corresponds with the UTM grid used
globally - coordinates in metres
- zones are 6 wide (1/2 degree overlap)
- zones numbered from zone 49 with central
meridian 111E to zone 57 with central meridian
159E - central scale factor k0 0.9996
- origin of each zone is the intersection of
central meridian with the equator
- false origin S 10 000 000m, W 500 000
- coordinates described in Easting (E) and
Northing (N)
73
The TM graticule and the AMG/MGA
Projection Transverse Mercator Ellipsoid GRS
80 Central Meridian 141.00000 Reference
Latitude 0.00000 Scale Factor 0.99960 False
Easting 500000 False Northing 10 000 000.00000
These parameters mean that the Central Meridian
of Zone 55 is at 141E so that it covers from
138E to 144E the Reference Latitude is 0.0000
(the equator, which is 0N) the origin of the
coordinate system is at the intersection of
the Central Meridion with the Reference Latitude
and thus is at (0N,144E), where the coordinates
are (x, y) (500 000,10 000 000) m. The false
Easting of 500,000m is to ensure that all points
in the zone have positive x coordinates. The
y-coordinates are always positive in the Northern
hemisphere because 0 is at the equator. In the
Southern Hemisphere, a false Northing of
10,000,000m is applied to ensure that the
y-coordinate is always positive. The Scale
Factor of 0.9996 means that along the Central
Meridian, the true scale of 1.0 is reduced
slightly so that at locations off the true
meridian the scale factor will be more nearly 1.0
(the Transverse Mercator projection distorts
distance positively as you move away from the
Central Meridian).
74
Converting spheroidal coordinates to grid (AMG)
coordinates
- E (K0nwCosf)1 term1 term2 term3
- Term1 (w2/6)Cos2f(y-t2)
- Term2 (w4/120)Cos4f4y3(1-6t2)y2(18t2)-y2t2t4
- Term3 (w6/5040)Cos6f(61-479t2179t4-t6)
- E E False Easting
- N K0m Term1 Term2 Term3 Term4
- Term1 (w2/2)nSinf Cosf
- Term2 (w4/24)nSinf Cos3f(4y2y-t2)
- Term3 (w6/720)nSinf Cos5f8y4(11-24t2)-28y3(1-6t
2)y2(1-32t2)-y(2t2)t4 - Term4 (w8/40320)nSinf Cos7f(1385-3111t2543t4-t6
) - N N False Northing
- Ko central scale factor 0.9996
- ? as defined in previous lecture
- ???????????
- ? geodetic latitude
- t tan?
- ??? geodetic longitude measured from central
meridian ?0, - positive eastwards ? - ?0
- m meridian distance
- To translate to false origin of AMG
- 10 000 000 m to northing
- 500 000 m to easting
75
Example from AGD to AMG
Data Station BUNINYONG Latitude f -37o 39
15.557 Longitude l c Zone 54 lo 141o
Computations w l - lo 143o 55 30.633 -
141o 2o 55 30.63
meridian distance
76
Example from AGD to AMG
m -4184650.83515514.577-8.259-.016
-4169144.533
Radii of curvature
Easting E .9996(258127.64828.736-.031
-.000036 258053.090 Northing N
.9996(-4169144.533-4025.327-2.435-.001.00000024
-4171503.027
E E False origin 500000.000 258053.090
758053.090 N N False origin
10000000.000 -4171503.027 5828496.973
77
Converting grid (AMG) coordinates to spheroidal
coordinates
- E E - False Easting x E/(K0n')
- f f - Term1 Term2 - Term3 Term4
- Term1 (t/K0r)(xE/2)
- Term2 (t/K0r)(Ex3/24)-4y29y(1-t2)12t2
- Term3 (t/(K0r)(Ex5)/720)8y4(11-24t2)-12y3
(21-71t2)15y2(15-98t215t4)180y(5t2-3t4)
360t4 - Term4 t/K0r)(Ex7/40320)(13853633t24095t4
1575t6) - w Term1 - Term2 Term3 - Term4
- Term1 x Secf Term2 (x3/6)Secf(y2t2)
- Term3 (x5/120)Secf-4y 3(1-6t2)y2(9-68t2)
72yt224t4 - Term4 (x7/5040)Secf(61662t21320t4720t6)
- l l0 w
78
Meridian Distance and Foot-point Latitude
m aA0f -A2Sin2fA4Sin4f -A6Sin6f where A0
1-(e2/4)-(3e4/64)-(5e6/256) A2
(3/8)(e2e4/415e6/128) A4 (15/256)(e43e6/4) A6
35e6/3072
The foot-point latitude (f) is the latitude for
which the meridian distance equals the true
northing divided by the central scale factor
(mN/k0). This value can be calculated directly,
once three other values are available. n
(a-b)/(ab) f/(2-f) G a(1-n)(1-n2)(1(9/4)n2(
225/64)n4)(p/180) s (mp)/(180G) The foot point
latitude (in radians) is then calculated by f
s((3n/2)-(27n3/32))Sin2s ((21n2/16)-(55n4/32))
Sin4s(151n3/96) Sin6s(1097n4/512)Sin8s
79
Example from AMG to AGD
Data Station BUNINYONG Zone 54 k0 0.9996 E
758053.090 N 5828496.973 False origin
-500000.000 False Origin -10000000.000
Computations E 258053.090 N
-4171503.027 m N/k0 -4173172.296 foot
point latitude
80
Example from AGD to AMG
f -37o 41 26.198 0o 2 10.7616 -
0.1206.0001-.00000015 -37o 39 15.557 l
141o 0o 55 36.9341 - 6.3081.0071-.0000099
143o 55 30.633
Redfearns formulae To transform to MGA use
parameters of the GRS80 ellipsoid
http//www.anzlic.org.au/icsm/gdatm/gdatm.htm
http//www.osg.vic.gov.au/mgadoc.htm
81
3 dimensional transformations
We have 2 problems
1. Transform GPS positions given in cartesian X,
Y, Z to geodetic ????, h (WGS84) to project onto
UTM
2. Convert GPS geodetic coordinates from WGS84
spheroid to AGD spheroid and hence to AMG.
With the advent of GDA2000 we are faced with the
further problem of converting AMG coordinates on
the AGD (ANS66) to MGA coordinates on the GDA
(GRS80).
82
1. Cartesian to Geodetic Coordinates
Recall
3 dimensional cartesian coordinates
spheroidal geodetic coordinates
As we measure on surface of the Earth, each
spheroidal geodetic coordinate has an associated
ellipsoidal height, h
h is measured positive outwards from the surface
of the spheroid along the surface normal
Remember ellipsoidal height orthometric height
geoid height
83
Bowrings Forward Transformation
(x, y, z)
(????, h)
The forward transformation is simple because it
is a closed formula
For GPS applications, the inverse transformation
is more important
Bowrings formulae work for transformations on
any spheroid
84
Example Bowrings Forward Transformation
Given the following ANS geodetic coordinates,
compute ANS cartesian coordinates
ANS cartesian coordinates have their origin at
centre of origin of ANS66. This origin is NOT
geocentric
? -32.000 ? 11554? h 30.0m
ANS66 parameters a 6378 160m e2 0.006
694 542
radius of prime vertical ? 6384163.694m
85
X (6 384 163.694 30.0). cos(-32). cos(115.9)
-2 364 890.007m
Y (6 384 163.694 30.0). cos(-32). sin(115.9)
4 870 298.747m
Z (6 384 163.694(1- 0.006 694 542) 30.0).
sin(-32) -3 336 458.978m
86
Bowrings Reverse Transformation
(x, y, z)
(????, h)
The reverse formula is more complicated because
after we rearrange the previous equation set we
get
which has ? on each side of the equation (in???
equation has to be solved iteratively
87
Bowrings Inverse Transformation - Iterative
Solution
1. Compute longitude, ?. This can be done
directly
? tan-1(y/x)
2. Compute p (x2 y2)1/2
3. Compute an approximate value ?0 of the
latitude from
88
(No Transcript)
89
Example - reverse of previous example
x -2 364 890.008 y 4 870 298.747 z -3 360
458.976
all on ANS66 but method holds for other spheroids
eg WGS84
1. computed longitude, ? tan-1(y/x)
tan-1 (4 870 298.747/-2 364 890.008) -6406?
or 11554?
Note ambiguity in tan-1 term. However, if you are
in Australia it is simple enough to work out
which is the correct longitude as one longitude
puts you on the other side of the world.
90
Example cont....
91
4. Compute an approximate value for the radius of
curvature in the prime vertical, ?0 from
6 384 163.694 (from program)
5. Compute the ellipsoidal height from
h p / cos?o - ?o
5414103.309/cos(-32.0000) - 6 384 163.694
30.00m
92
(No Transcript)
93
2. Change of Spheroid
We now know how to transform cartesian (X, Y, Z)
coordinates to geodetic (????? h) coordinates
(and vice versa)
Because GPS coordinates are computed in WGS84 and
AGD is on the ANS66 spheroid we must be able to
transform from one spheroid to another
This can be done in a number of ways but the
easiest is using a 7-parameter transformation of
cartesian coordinates
94
A 7-parameter transformation is essentially a
helmert transformation in 3 dimensions
Z
z?
x?
O?
y?
Y
O
X
We wish to transform one cartesian coordinate
system to another
95
7 parameter transformation
where
X, Y, Z and x?, y?, z? are cartesian coordinates
centred on O and O? respectively
1 ds represents the scale factor to be applied
between the two coordinate systems
dx, dy, dz is the vector representing the origin
shift between O? and O
96
(No Transcript)
97
The changes induced by the rotations can be
expressed in terms of the following rotation
matrices
When fully multiplied out the full rotation
matrix becomes
98
When the values of ?x, ?y, ?z are very small
(usually the case in change of spheroid
computations) the cosines can be assumed equal to
1 and the sines equal to the numerical values of
the angles themselves expressed in radians.
R becomes
where rx, ry, rz are the small rotations in
radians
The matrix R is known as a Rodrigues matrix
99
So the 7-parameter transformation can be written
as
To transform from one spheroid to another we need
to know the transformation parameters, dx, dy,
dz, ds, rx, ry, rz
Note for the reverse transformation we need only
change the signs of the seven transformation
parameters
100
Transformation Parameters in Australia
- A set of transformation parameters from
WGS84 to AGD84 have been computed by Higgins
(1987) - dx -116.00m
- dy -50.47m
- dz 141.69
- rx -0.23
- ry -0.39
- rz 0.344
- ds -0.0983ppm
- A set of transformation parameters from
AGD84 to GDA94 have been computed by Auslig - dx -117.763m
- dy -51.510m
- dz 139.061
- rx -0.292
- ry -.443
- rz -.277
- ds -.191ppm
- These supersede Higgins 1987 parameters
101
Example
convert WGS84 coordinates
to AGD84.
1. Form R matrix (convert angles to radians)
102
2. Apply matrix and origin shift
X -2 364 759.300 Y 4 870 348.935 Z
-3 360 610.238AGD
103
WGS84 cartesian to AMG
7 parameter
Bowring
Redfearn
Note height transformed by hWGS84 - N HAHD
Recommended
CrystalGraphics Presentations