
Trajectory GraphBased Planning Under Uncertainty
1 / 8
Title:
Trajectory GraphBased Planning Under Uncertainty
Description:
Multi-step = n-nested Riccati Equations (non-linear) Solution: Decomposition ... (n x n) nonlinear Riccati Equation into (2n x 2n) linear system (n x n) (2n x ... –
Number of Views:26
Avg rating:3.0/5.0
Title: Trajectory GraphBased Planning Under Uncertainty
1
Trajectory Graph-Based Planning Under Uncertainty
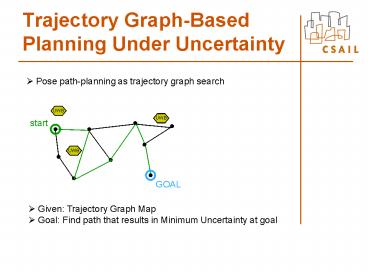
- Pose path-planning as trajectory graph search
UWB
UWB
start
UWB
GOAL
- Given Trajectory Graph Map
- Goal Find path that results in Minimum
Uncertainty at goal
2
How to predict uncertainty?
- Use Kalman Filter beliefs
- Propagate covariance with KF updates
- Assume
- mean discrete points along trajectory
- measurements KF predicted measurements
3
(Poor) Example
4
Multi-Step Update as One-Step
- For efficient graph search, want efficient
update (One-Step)
5
Solution Decomposition
6
Solution Decomposition
7
Algebraic Solution
Matrix Inversion Lemma --gt Duality KF/IF
Adding Information
Losing Uncertainty
Losing Information
Adding Uncertainty
Both updates in Fractional Form --gt Matrix
Continued Fractions
8
Star Product
Recommended
CrystalGraphics Presentations





























