
Poster EGS 2003 - PowerPoint PPT Presentation
1 / 1
Title:
Poster EGS 2003
Description:
A new version of the Wiener filter will be used, that is expected to give rise ... Error estimates of both Wiener filter and gridding have to be better tuned. ... – PowerPoint PPT presentation
Number of Views:27
Avg rating:3.0/5.0
Title: Poster EGS 2003
1
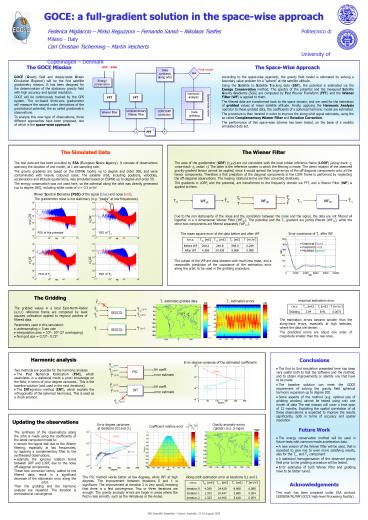
GOCE a full-gradient solution in the space-wise
approach
Federica Migliaccio Mirko Reguzzoni Fernando
Sansò Nikolaos Tselfes Politecnico di Milano -
Italy Carl Christian Tscherning Martin
Veicherts University of Copenhagen
Denmark
The GOCE Mission
The Space-Wise Approach
GOCE (Gravity field and steady-state Ocean
Circulation Explorer) will be the first satellite
gradiometry mission. It has been designed for the
determination of the stationary gravity field
with high accuracy and spatial resolution. GOCE
will be continuously tracked by the GPS system.
The on-board three-axis gradiometer will measure
the second order derivatives of the gravitational
potential, the so called gradiometric
observations. To analyze this new type of
observations, three different approaches have
been proposed, one of which is the space-wise
approach.
According to the space-wise approach, the gravity
field model is estimated by solving a boundary
value problem for a sphere at the satellite
altitude. Using the Satellite to Satellite
Tracking data (SST), the potential is estimated
via the Energy Conservation method. The spectra
of the potential and the measured Satellite
Gravity Gradients (SGG) are computed by Fast
Fourier Transform (FFT) and the Wiener Filter
(WF) is applied to them. The filtered data are
transformed back to the space domain, and are
used for the estimation of gridded values at mean
satellite altitude. Finally, applying the
Harmonic Analysis operator to these gridded data,
the coefficients of a spherical harmonic model
are estimated. The procedure is then iterated in
order to improve the along-orbit signal
estimates, using the so-called Complementary
Wiener Filter and Rotation Correction. The
performance of this space-wise scheme has been
tested, on the basis of a realistic simulated
data set.
The Wiener Filter
The Simulated Data
The test data-set has been provided by ESA
(European Space Agency). It consists of
observations spanning the duration of one month,
at 1 sec sampling rate. The gravity gradients
are based on the EGM96 model, up to degree and
order 360, and were contaminated with heavily
coloured noise. The satellite orbit, including
positions, velocities, accelerations and attitude
quaternions, was simulated based on EGM96 up to
degree and order 50. The energy conservation was
not used here, so the potential along the orbit
was directly generated (up to degree 360),
including white noise of s 0.3 m2/s2
The axes of the gradiometer (GRF) (x,y,z) are not
coincident with the local orbital reference frame
(LORF) (along-track ?, cross-track ?, radial
r). The latter is the reference system in which
the filtering is made. The direct rotation of the
observed gravity-gradient tensor cannot be
applied, since it would spread the large errors
of the off-diagonal components onto all the
tensor components. Therefore a first prediction
of the diagonal components in the LORF frame is
performed by neglecting the off-diagonal
observations. The missing rotations terms are
then corrected iteratively. The gradients in
LORF, and the potential, are transformed to the
frequency domain via FFT, and a Wiener Filter
(WF) is applied to them.
Power Spectral Densities (PSD) of the signal
(blue) and noise (red). The gradiometer noise is
not stationary (e.g. peaks at low frequencies).
Due to the non stationarity of the noise and the
correlation between the noise and the signal, the
data are not filtered all together in a 4
dimensional Wiener Filter (WF4D). The potential
and the Trr gradient are jointly filtered (WF2D),
while the other two components are filtered
separately (WF1D).
m2/s2 Hz
PSD of the potential
PSD of Txx
The mean square error of the data before and
after WF
Error covariance of Trr after WF
Hz
Hz
r.m.s. T?? mE T?? mE Trr mE T m2/s2
Before WF 269.2 246.8 548.0 0.299
After WF 4.369 24.428 9.968 0.088
- Empirical (blue)
- Predicted (red)
- Modelled (green)
mE2
The output of the WF are data streams with much
less noise, and a reasonable prediction of the
covariance of the estimation error along the
orbit, to be used in the gridding procedure.
PSD of Tyy
PSD of Tzz
sec
Hz
Hz
The Gridding
empirical estimation error
Trr estimated gridded data
Trr estimated errors
mE
mE
r.m.s Tnn mE Trr mE T m2/s2
Gridding 3.04 8.41 0.0675
The gridded values in a local East-North-Radial
(e,n,r) reference frame are computed by least
squares collocation applied to regional patches
of filtered data.
The estimation errors become smaller than the
along-track errors, especially at high latitudes,
where the data are denser. The predicted errors
are about one order of magnitude smaller than the
real ones.
- Parameters used in this simulation
- undersampling 5 sec rate
- interpolation area 10? 10 (2 overlapping)
- final grid size 0.72? 0.72
Harmonic analysis
Conclusions
Error degree variances of the estimated
coefficients
- The End to End simulation presented here has
been very useful both to test the software and
the method, and to obtain improvements or
identify any that have to be made. - The baseline solution can meet the GOCE
requirement of solving the gravity field
spherical harmonic expansion up to degree 200. - Some aspects of the method (e.g. optimal size of
gridding window) cannot be tested using only one
month of data The real mission will cover a time
span of 12 months. Exploiting the spatial
correlation of all these observations is expected
to improve the results significantly, both in
terms of accuracy and spatial resolution.
- Two methods are possible for the harmonic
analysis - The Fast Spherical Collocation (FSC), which
assimilates in a statistical mode a priori
knowledge on the field, in terms of prior degree
variances. This is the baseline solution (and
used in the next iterations). - The INTegration method (INT), which exploits the
orthogonality of the spherical harmonics. This is
used as a check solution.
EGM96
INT
FSC
Updating the observations
Gravity anomaly errors (global r.m.s. 5 mgal)
Error degree variances at iterations (0) and (1)
Coefficient relative error
Future Work
mgal
- The synthesis of the observations along the orbit
is made using the coefficients of the latest
computed model to - recover the signal lost due to the Wiener
filtering, especially at low frequencies, by
applying a complementary filter to the
synthesised observations. - estimate the ignored rotation terms between GRF
and LORF, due to the noisy off-diagonal
components. - These two correction terms, added to the filtered
data, result in a significant decrease of the
estimation error along the orbit. Then the
gridding and the harmonic analysis are repeated.
The iteration is terminated at convergence.
EGM96
- The energy conservation method will be used in
future tests with common-mode acceleration data. - A new version of the Wiener filter will be used,
that is expected to give rise to even more
satisfying results, also for the T?? and T?r
component - A statistical homogenisation of the observed
gravity field prior to the gridding procedure
will be tested. - Error estimates of both Wiener filter and
gridding have to be better tuned.
FSC (0)
INT (0)
INT (1)
FSC (1)
The FSC method works better at low degrees, while
INT at high degrees. The improvement between
iterations 0 and 1 is significant. The
improvement at iteration 2 is very small, meaning
that there is a fast convergence. Two or three
iterations are enough. The gravity anomaly errors
are larger in areas where the field is less
smooth, such as the Himalayas or the Andes.
Along-orbit estimation error at iterations 0,1
and 2
Acknowledgements
r.m.s. T?? mE T?? mE Trr mE T m2/s2
iteration 0 4.369 24.428 9.968 0.088
iteration 1 1.333 10.447 3.685 0.054
iteration 2 1.323 10.406 3.618 0.054
This work has been prepared under ESA contract
18308/04/NL/NM (GOCE High-level Processing
Facility).
IAG Scientific Assembly Cairns, Australia,
22-26 August 2005