
Impact - PowerPoint PPT Presentation
1 / 1
Title: Impact
1
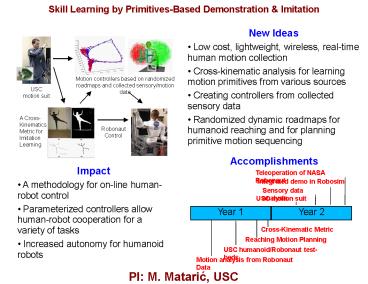
Skill Learning by Primitives-Based Demonstration
Imitation
- New Ideas
- Low cost, lightweight, wireless, real-time
human motion collection - Cross-kinematic analysis for learning motion
primitives from various sources - Creating controllers from collected sensory
data - Randomized dynamic roadmaps for humanoid
reaching and for planning primitive motion
sequencing
Motion controllers based on randomized roadmaps
and collected sensory/motion data
USC motion suit
A Cross-Kinematics Metric for Imitation Learning
Robonaut Control
Accomplishments
Impact A methodology for on-line human-robot
control Parameterized controllers allow
human-robot cooperation for a variety of tasks
Increased autonomy for humanoid robots
Teleoperation of NASA Robonaut
Integrated demo in Robosim
Sensory data analysis
USC motion suit
Year 1
Year 2
Cross-Kinematic Metric
Reaching Motion Planning
USC humanoid/Robonaut test-beds
Motion analysis from Robonaut Data
PI M. Mataric, USC
Recommended
CrystalGraphics Presentations





























