
Coordinate Frames - PowerPoint PPT Presentation
1 / 28
Title: Coordinate Frames
1
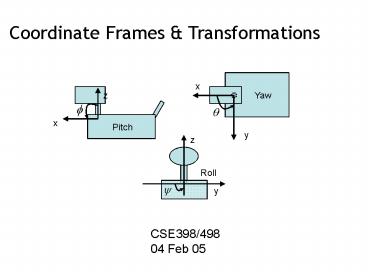
Coordinate Frames Transformations
CSE398/498 04 Feb 05
2
Administration
- Todays lab is cancelled
- Lab sessions will resume (most likely) next
Monday - We will be migrating (most likely) to Linux
- I will make the lab available for teams to make
up these hours
3
Robot Safety
- Know where your dog is at all times. If you
tread on its ankle while stepping backwards, it
will hurt.
4
References
- Essential Kinematics for Autonomous Vehicles,
Alonzo Kelly, TR CMU-RI-TR-94-14, - http//www.frc.ri.cmu.edu/alonzo/pubs/reports/pdf
_files/kinematics.pdf
5
Background
- Ultimately, each Aibo will need to estimate the
relative position of items of interest (the ball,
the goal, teammates, etc.) from a camera image - Let us assume that using its camera alone, the
Aibo is able to infer the relative distance to
the ball - How could it do this???
- The Aibos head has 2 degrees of freedom
(ignoring the lower neck joint for now) - It can pan left and right (yaw)
- It can tilt up and down (pitch)
6
Todays Question
- The Aibo sees the soccer ball in the center of
the camera image - The ball is estimated to be 1 meter away
- Its head is panned to the left 45 degrees
- Its head is tilted down 20 degrees
- Q Where is the ball?
- A Relative to what?
7
Defining a Reference Frame
- Prior to any position estimation, the coordinate
frame that we are measuring relative to must be
defined - Q1 Where is the ball?
- A1 Relative to what?
- Q2 OK Where is the ball relative to the
reference frame below?
8
Defining a Reference Frame (contd)
- A2 1 a nose, 0, 0T
- OK, maybe that wasnt such a good choice
- Lets try a body fixed frame
9
Defining a Reference Frame (contd)
- Or better still, why not define several relevant
coordinate frames
Body Frame
Sensor Head Frame
Sensor (Camera) Frame
10
Todays Question
- The Aibo sees the soccer ball in the center of
the camera image - The ball is estimated to be 1 meter away from the
camera frame - Its head is tilted up 20 degrees
- Its head is panned to the left 45 degrees
- Its neck is tilted down 30 degrees
- Q What is the balls position in the body
frame? - A Lets look at coordinate transformations
first
11
Coordinate Transformations
- A Coordinate Transformation relates the position
vector of any point in coordinate frame 2 to the
same point in coordinate frame 1 - We are interested in Rigid Transformations which
reflect the relative position and orientation of
1 coordinate frame with respect to another - Here ix denotes the position vector for point x
as viewed from coordinate frame i, iRj denotes a
rotation matrix which describes the rotation
necessary to align the axis of coordinate frame i
to j, and itj the translation from the origin of
frame i to j - The rigid transformation necessary to align
coordinate frame i with j has the opposite effect
of translating points from frame j to frame i
12
Rotation Matrices
- A rotation matrix R rotates position vectors in
reference frame 2 (F2) to position vectors in F1 - In two dimensions
- where ? corresponds to the relative difference
in orientation of F2 with respect to F1 - In this definition, R transforms a position
vector in F2 to how the corresponding position
vector would appear in frame F1.
13
Coordinate Transformationfrom Pure Rotation
14
Coordinate Transformationfrom Pure Rotation
Example
Example Lets say that a point in frame F2 is
1,0T , and ?30o. What are the points
coordinates in frame F1?
p
15
Some Properties of Rotation Matrices
- det(R) 1, RTR-1
- RI denotes no rotation
- The product of 2 rotation matrices is a rotation
matrix - In three dimensions
- where xyz rotations correspond to roll, pitch,
and yaw
NOTE Order is important, as ABC ? ACB in
general
16
Pure Translations
- A pure translation corresponds to a
transformation when RI. The equation for a
rigid transformation then reduces to
17
Pure Translations
Example Lets say that a point in frame F2 is
4,3T , t10,5T and ?0o. What are the
points coordinates in frame F1?
2p
1p
1t2
18
General Rigid Transformation
1p
19
Homogeneous Coordinates
- There is no nice way to represent translations
using a 2x2 matrix in R2 (or 3x3 matrix in R3) - Homogeneous Coordinates provide a convenient
means for representing and composing multiple
rigid transformations - The dimension of each coordinate is increased by
1
20
Homogeneous Coordinates
- There is no nice way to represent translations
using a 2x2 matrix in R2 (or 3x3 matrix in R3) - Homogeneous Coordinates provide a convenient
means for representing and composing multiple
rigid transformations - The dimension of each coordinate is increased by
1 - Last coordinate normally normalized to 1
21
Homogeneous Coordinates (contd)
- An important property of homogenous coordinates
is that two are equivalent if they are a scalar
multiple of one another - HC also provides a convenient representation for
points at infinity
22
Homogeneous Transformation Matrices
- With this representation, we can compose a rigid
transformation into a single, linear
transformation matrix. - In two dimensions, the representation is as
follows - Note that this is a rotation followed by a
translation, which is NOT the same as the reverse!
1t2
1R2
constant
23
Homogeneous Transformation Matrices in Three
Dimensions
- The representation readily extends to three
dimensions
24
Pop Quiz ?
- The distance from the camera in the dogs nose to
the origin of the head frame is 8 cm, as is the
body frame from the head frame. If only the neck
joint is tilted by an angle f, write the
homogenous transform relating the nose position
in the head frame with the body frame.
Nose
Neck Joint
Head Frame
25
Composing Homogenous Transformations
- Perhaps the strongest point for the homogeneous
transformation representation is the ability to
compose multiple transformations across multiple
frames - Suppose we would like to estimate the position of
a point that has seen coordinate transformations
across 2 frames
3p
1A2
3y
3x
2A3
26
Composing Homogenous Transformations
2p
3p
1A2
3y
1p
3x
2A3
- This generalizes for n frames
- NOTE The transformations are done LOCAL to the
current frame
27
Todays Homework
- The Aibo sees the soccer ball in the center of
the camera image - The ball is estimated to be 1 meter away from the
camera frame - Its head is tilted up 20 degrees
- Its head is panned to the left 45 degrees
- Its neck is tilted down 30 degrees
- Q1 What are the necessary homogeneous
transformations to calculate this? - Q2 What is the balls position in the body
frame?
28
Summary
- Points are defined with respect to a specific
coordinate frame - Often, it is convenient to measure a point with
respect to one frame (e.g. an objects position
in the sensor frame), but it must be transformed
to another frame for other reasons (e.g.
navigational convenience) - Coordinate transformations provide this mechanism
- The transformation necessary to align coordinate
frame F1 with frame F2 is also the same
transformation necessary to convert points from
frame F2 to frame F1 - Homogeneous coordinates provide a convenient
means for representing and composing rigid
transformations
Recommended
CrystalGraphics Presentations





























