
Attitude Determination of a Land Vehicle Using - PowerPoint PPT Presentation
Title:
Attitude Determination of a Land Vehicle Using
Description:
Angular rates and accelerations from an inertial measurement unit (IMU) are ... Geographic position: latitude, longitude, and altitude. Signal Processing ... – PowerPoint PPT presentation
Number of Views:42
Avg rating:3.0/5.0
Title: Attitude Determination of a Land Vehicle Using
1
Attitude Determination of a Land Vehicle
Using Inertial Measurement Units
By Brian Bleeker
Rob MacMillan Advisor Dr. In Soo Ahn
Raw Data
Department of Electrical and Computer Engineering
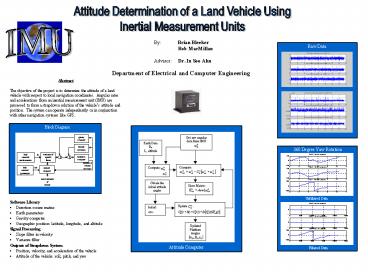
Abstract The objective of the project is to
determine the attitude of a land vehicle with
respect to local navigation coordinates. Angular
rates and accelerations from an inertial
measurement unit (IMU) are processed to form a
strapdown solution of the vehicles attitude and
position. The system can operate independently
or in conjunction with other navigation systems
like GPS.
- Software Library
- Direction cosine matrix
- Earth parameters
- Gravity computer
- Geographic position latitude, longitude,
and altitude - Signal Processing
- Slope filter in velocity
- Variance filter
- Outputs of Strapdown System
- Position, velocity, and acceleration of the
vehicle - Attitude of the vehicle roll, pitch, and yaw