
Radar DGPS Chart Plotter Sounder - PowerPoint PPT Presentation
1 / 68
Title:
Radar DGPS Chart Plotter Sounder
Description:
Radar/ DGPS/ Chart Plotter/ Sounder. Common Radar types. X-band. 3 cm wavelength. Short distance ... PRT is time from beginning of one pulse to the beginning of ... – PowerPoint PPT presentation
Number of Views:529
Avg rating:3.0/5.0
Title: Radar DGPS Chart Plotter Sounder
1
(No Transcript)
2
(No Transcript)
3
Radar/ DGPS/ Chart Plotter/ Sounder
4
Common Radar types
- X-band
- 3 cm wavelength
- Short distance
- High resolution
- S-band
- 10 cm wave length
- Long distance
- Low resolution
5
Pulse Transmission
- Pulse Width (PW)
- Length or duration of a given pulse
- Pulse Repetition Time (PRT1/PRF)
- PRT is time from beginning of one pulse to the
beginning of the next - PRF is frequency at which consecutive pulses are
transmitted. - PW can determine the radars minimum detection
range PW can determine the radars maximum
detection range. - PRF can determine the radars maximum detection
range.
6
Pulse Transmission
7
- The components of a pulse radar system.
- 1. Synchronizer
- 2. Transmitter
- 3. Antenna
- 4. Duplexer
- 5. Receiver
- 6. Display unit
- 7. Power supply
8
Pulse Radar Components
Synchronizer
Transmitter
RF Out
Power Supply
ANT.
Duplexer
Echo In
Display Unit
Receiver
Antenna Control
9
Components of RADAR
1. Transmitter - Consists of an oscillator
that produces radio-frequency (RF) waves. 2.
Modulator - Essentially a timing device
that regulates the transmitter so that it sends
out relatively short pulses of energy
seperated by relatively long periods of rest.
10
Components of RADAR
3. Antenna - Controlled by the modulator to
perform two functions forms outgoing pulses
into beams and collects the returning
pulses. 4. Receiver - Comprised of the
circuitry that amplifies the weak returning
echoes from a contact and converts them into a
form which may be presented on a display.
11
Components of RADAR
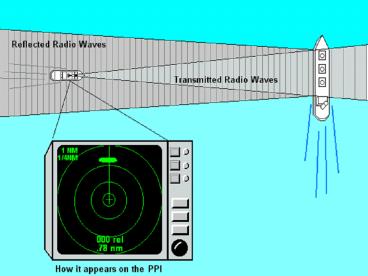
5. Radar Repeater - A Cathode Ray Tube (CRT)
displays the radar information. - For surface
navigation, the Plan Position Indicator (PPI)
is used. Controls - Variable Range Ring
(strobe) -Variable Bearing Marker
- Range Rings -
Range Scales can be altered
12
Antennae
- Two Basic Purposes
- Radiates Radio Energy
- Provides Beam Forming and Focus
- Must Be 1/2 of the Wave Length for the maximum
wave length employed - Wide for Search, Narrow for Track
- Navigation radar
- - 1 horizontal width
- - 15 vertical width (detect objects also during
pitching and rolling)
13
Limitations of RADAR
1. Bearing Resolution - The minimum difference
in bearing between two objects at the same
range. - Related to Beam Width 2. Range
Resolution - The minimum difference in range
between two objects on the same bearing that can
be separated by a radar. - Related to Pulse
Width
14
Beamwidth Vs. Accuracy
15
Range Resolution
Transmitted Pulse
Echo
Targets
16
Range Resolution
Transmitted Pulse
Echo
Appears as one contact on the radar screen.
Targets
17
Factors That Affect Radar Performance
- Signal Reception
- Receiver Bandwidth
- Pulse Shape
- Power Relation
- Beam Width
- Pulse Repetition Frequency
- Antenna Gain
- Radar Cross Section of Target
- Signal-to-noise ratio
- Receiver Sensitivity
- Pulse Compression
- Scan Rate
- Mechanical
- Electronic
- Carrier Frequency
- Antenna aperature
18
Pulse Effects on Radar Performance
- Pulse Shape
- Pulse Width
- Pulse Compression
- Pulse Power
19
Pulse Shape
- Determines range accuracy and minimum and maximum
range. - Ideally we want a pulse with vertical leading and
trailing edges. This requires indefinite
bandwidth.
20
Pulse Width
- Determines the range resolution.
- Determines the minimum detection range.
- Can also determine the maximum range of radar.
- The narrower the pulse, the better the range
resolution.
21
Pulse Compression
- Increases frequency of the wave within the pulse.
- Allows for good range resolution while packing
enough power to provide a large maximum range.
22
Pulse Power
- High peak power is desirable to achieve maximum
ranges. - Low power means smaller and more compact radar
units and less power required to operate. - Low power implies a lower duty cycle.
23
Other Factors Effecting Performance
- Scan Rate and Beam Width
- Narrow beam require slower antenna rotation rate.
- Pulse Repetition Frequency
- Determines radars maximum range(tactical factor).
- Carrier Frequency
- Determines antenna size, beam directivity and
target size. - Radar Cross Section (What the radar can
see(reflect)) - Function to target size, shape, material, angle
and carrier frequency.
24
(No Transcript)
25
Bearing Resolution
Own Ship Info
Contact Info CPA
Actual Bearing - 002 Radar Bearing - 004
Beam Width
Own Ship Info
Options Menu
1 2
3 4
11 12
5 6
7 8
9 10
26
Signalbehandling
- Forsterkning
- Unngå metning, men se svake ekko.
- Sjøekkodemping/ Anti Clutter Sea
- Demper forsterkning mye for nære ekko, avtagende
med tid. - Sensitive Time Control - STC
- Regnekkodempning/ Anti Clutter Rain
- Diffrentialkontroll- fjerner lange ekko
- Fast Time Constant
27
(No Transcript)
28
VESSEL IS STEAMING ON A COURSE OF 280 T AT 9
KNOTS THE PPI SHOWS TARGETS at 1305 323 R
9.0 nm at 1313 324 R 6.5 nm at 1320
327 R 4.4 nm at 1325 331 R 3.0 nm
29
HOW CLOSE WILL THIS TARGET COME TO OUR VESSEL,
AND AT WHAT TIME WILL IT APPROACH CLOSEST TO
OUR VESSEL
30
CONVERT RELATIVE BEARINGS TO TRUE BEARINGS
322 280 242 324 280 244 327 280
247 334 280 251
PLOT ON MANEUVERING BOARD LABEL EACH WITH
TIME OBSERVED
31
DRAW A LINE THROUGH ALL 4 POINTS
32
RELATIVE SPEED OF TARGET
T 1325 - 1305 T 0020
S 60 X D T S 60 X 6.1 20 S
18.3 kts
RELATIVE SPEED 18.3 kts
33
RELATIVE COURSE 058
RELATIVE COURSE 058
34
CLOSEST POINT OF APPROACH IS FROM THE CENTER
OF MANEUVERING BOARD TO THE LINE OF RELATIVE
MOTION (AT RIGHT ANGLES) 058 - 90 328
35
MEASURE CPA DISTANCE
CPA DISTANCE IS 0.7 nm at 1328
36
COMPUTE TIME TO CPA
MEASURE DISTANCE FROM 1305 POINT TO CPA
POINT COMPUTE TIME TO TRAVERSE FROM 1305
PT TO CPA ADD TIME TO 1305 1305 0030
1335 CPA OCCURS AT 1335
DISTANCE FROM 1305 POINT TO CPA IS 9 nm.
37
THE RADAR TARGET WILL APPROACH CLOSEST TO THE
BOAT AT 1335 THE CLOSEST IT WILL COME WILL BE
0.7 nm
38
RADAR PILOTING AND RELATIVE MOTION
WHAT IS THE SPEED AND DIRECTION OF
THE TARGET?
39
RADAR PILOTING AND RELATIVE MOTION
THIS IS NOW A VELOCITY PLOT ON THE
MANEUVERING BOARD
C280 S9
PLOT YOUR VESSELS VELOCITY VECTOR
OWN CRS AND SPD
40
PLOT RELATIVE VELOCITY VECTOR OF
TARGET 058 at 18.3 kts
REL CRS 058 REL VEL 18.3
41
RADAR PILOTING AND RELATIVE MOTION
DRAW VECTOR FROM CENTER TO HEAD OF
RELATIVE VELOCITY VECTOR OF TARGET
42
RADAR PILOTING AND RELATIVE MOTION
THIS IS THE TARGETS TRUE COURSE 030 AND
ITS TRUE SPEED 13 kts
43
(No Transcript)
44
OWN BOAT POSITION AT 1305 HOURS TARGET IS 242
T AT 9 MILES
Own Boat Position at 1305
242 T 9 nm
Target Position at 1305
45
OUR BOAT POSITION AT 1313 TARGET IS 244 T AT
6.5 nm
Advance own boat from the 1305 position to the
1313 position
1313
1305
244 T 6.5 nm
1313 - 1305 8 60 D S x T D S x T / 60 D 9
x 8 / 60 D 1.2 nm
242 T 9 nm
Target Position at 1313
46
OUR BOAT POSITION AT 1320 TARGET IS 247
T AT 4.4 nm
Advance own boat from the 1305 position to the
1320 position
1320
247 T 4.4 nm
1320 - 1305 15 60 D S x T D S x T / 60 D
9 x 15 / 60 D 2.25 nm
244 T 6 nm
242 T 9 nm
47
OUR BOAT POSITION AT 1325 TARGET IS 251 T AT
3 nm
Advance own boat from the 1305 position to the
1325 position
1325
251 T 3 nm
1305
247 T 4.4 nm
1325 - 1305 20 60 D S x T D S x T / 60 D
9 x 20 / 60 D 3 nm
244 T 6 nm
242 T 9 nm
48
WILL THE TWO BOATS COLLIDE?
OWN BOAT
1325
251 T 3 nm
1305
247 T 4.4 nm
244 T 6 nm
TARGET BOAT
TARGET BOAT DIRECTION IS 030 TRUE
242 T 9 nm
49
WILL THE TWO BOATS COLLIDE?
OWN BOAT
1325
251 T 3 nm
1305
TARGET BOAT COURSE DIRECTION IS 030 TRUE
CALCULATED CLOSEST POINT OF APPROACH OCCURS
AT 1335
TARGET BOAT
242 T 9 nm
50
WILL THE TWO BOATS COLLIDE?
AT 1335 OWN BOAT POSITION IS 1335 - 1305
30 D S X T / 60 D 9 X 30 / 60 D 4.5
OWN BOAT
1335
251 T 3 nm
1305
TARGET BOAT
242 T 9 nm
51
WILL THE TWO BOATS COLLIDE?
AT 1335 TARGET BOAT POSITION IS 1335 - 1305
30 D S X T / 60 D 13 X 30 / 60 D 4.5
TARGET BOAT
OWN BOAT
1335
1335
1305
251 T 3 nm
242 T 9 nm
ADVANCE THE TARGET BOAT FROM 1305 TO 1335 POSITION
52
WILL THE TWO BOATS COLLIDE?
1335
TARGET BOAT
1335
OWN BOAT
MEASURE THE DISTANCE BETWEEN THE BLUE AND
ORANGE DOTS
NO!
1305
0.7 MILES
53
328 DEGREES TRUE TO THE CLOSEST POINT
OF APPROACH
TARGET BOAT
OWN BOAT
0.7 MILES
0.7 MILES
54
SHIP CONTROLS AND INDICATORS
55
RADAR/ARPA
56
ARPA oversikt
- Automatic Radar Plotting Aid
- Automatisk plotting av radar data
- Automatisk kollisjons varsling
- CPA Closest Poin of Approach
- Et måls antatte nærmeste passeringsacstand
- TCPA Time to Closest Point of Approach
- Tid til CPA
57
ARPA Main view Hitec NaviNet
58
Radar video with chart underlay DataBridge 10
59
(No Transcript)
60
True Motion
- Own ship will move across the screen within 70
of effective diameter according to course, speed
and range scale. - Afterglow is true in this mode
61
Relative Motion (Relative afterglow)
- Own ship position on the display will now be
stationary. All objects will move relative to own
ship. - Afterglow is relative in this mode.
62
True Vector
- True Vector will automatically be selected when
in true motion and in relative Motion, true
afterglow mode. - TV shows true course of own ship and tracked
targets. Length in minutes as chosen by operator,
see chapter on Vector Presentation. - True vector may also be selected in relative
motion.
63
Relative Vector
- Automatically chosen when Relative Motion mode is
selected. It is, however, possible to select
this vector presentation in true motion and in
relative motion, true afterglow mode.
64
- North Up
- Gives North Up presentation in the display with
true north always indicated at the top of the
compass ring. - Course Up
- Own ships course when entering Course Up will be
fixed straight up until North Up or Head Up is
selected - Head Up
- Display showing heading up at all times. The
Azimuth ring is relative to own ship
65
Ships Data
- Heading (Own heading in degrees)
- Speed (Own speed in knots)
- Stab (Stabilisation Sea, GPS, FIX )
- Any faults on the sensors (heading and speed)
are indicated by a red colored background.
66
Target information
- Target number.
- Bearing (from own ship in degrees true)
- Range (from own ship in nautical miles)
- CPA (Closest Point of Approach in nautical miles)
- TCPA (Time to Closest Point of Approach in
minutes) - Course (Target course in degrees true)
- Speed (Target speed in knots)
- BCR (Bow Crossing Range in nautical miles)
- BCT (Bow Crossing Time in min. and sec.)
67
Range/ Vector
- Range
- The range and the corresponding range rings
- Vector Presentation
- The length of the vectors (own ships and
targets) can be adjusted to one of the
following settings - 3, 6, 9, 12, 15, 20, 25 or 30 minutes
68
CPA / TCPA
- CPA Closest Point of Approach (in nautical miles)
- TCPA Time to Closest Point of Approach (in
minutes) . - When a tracked target is passing within the
selected CPA LIMIT, the collision warning will
sound and the target vector will be drawn red
when there is less time left than the chosen
TCPA LIMIT
Recommended
CrystalGraphics Presentations





























