
Eigenvalues and Eigenvectors - PowerPoint PPT Presentation
Title:
Eigenvalues and Eigenvectors
Description:
EG1C2 Engineering Maths: Matrix Algebra 7. Markov Process ... EG1C2 Engineering Maths: Matrix Algebra 7. The eigenvector of P when = 1 gives steady value of j. ... – PowerPoint PPT presentation
Number of Views:1284
Avg rating:3.0/5.0
Title: Eigenvalues and Eigenvectors
1
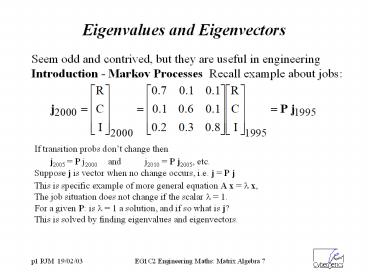
Eigenvalues and Eigenvectors
- Seem odd and contrived, but they are useful in
engineering - Introduction - Markov Processes Recall example
about jobs
If transition probs dont change then j2005 P
j2000 and j2010 P j2005, etc. Suppose j is
vector when no change occurs, i.e. j P j This
is specific example of more general equation A x
? x, The job situation does not change if the
scalar ? 1. For a given P is ? 1 a solution,
and if so what is j? This is solved by finding
eigenvalues and eigenvectors.
2
Analysis of General Equation A x ? x
- A value of scalar ? which satisfies the above is
an eigenvalue of A. - (or characteristic value or latent root of A)
- Note, if A is nn, x is n1 and A has n
eigenvalues - For each ?, an x which satisfies A x ? x is an
eigenvector of A. - Sometimes eigenvalues are labelled as ?
x 0 is a (boring) solution Now Ax lx
or Ax - lx 0 or (A - lI) x 0
By Cramers rule, this has a non trivial solution
if A - lI 0. So ? found by solving A - lI
0 (characteristic equation) If A is nn A -
lI 0 is nth order polynomial so n eigenvalues
3
Simple Example 22 matrix
A - lI (-4-l)(-3-l)-21 l2 4l 3l 12-2
l2 7l 10 In this case, the characteristic
equation is l2 7l 10 0 The
characteristic polynomial is l2 7l 10 It
factorises as (l 5) (l 2). The solutions for
the characteristic equation are therefore l
-5 and l -2. These are the two
eigenvalues for the matrix A.
4
Finding Eigenvectors Eigenvectors are x which
satisfy (A - lI) x 0 for each l
This represents equations x1 x2 0 and
2x1 2x2 0 Not independent - infinitely many
solutions - always happens
So choose x11, say, then x2-1. Thus an
eigenvector is As are multiples of this vector
(recall Ax lx)
This represents -2x1 x2 0 and 2x1 - x2
0 Again not independent let x11, so x22. So
eigenvector
5
Exercise Find eigenvalues and eigenvectors of
A - lI ( - l )( - l ) -
l2 l 0 Thus eigenvalues
are l and l
Top line is x1 4 x2 0. Let x21, so
x1
Top line is x1 4 x2 0. Let x21, so
x1
6
Markov Process Example
Has this an eigenvalue of 1? SolveP - lI
0. If so, then find associated eigenvector
0.3 - 1.4 2.1 -1 0 so ?1 is a solution
(others are 0.5 0.6)
7
The eigenvector of P when ? 1 gives steady
value of j.
Find j using Gaussian elimination
8
Row3 shows there are infinitely many solutions
as expected. From second row -1.1C 0.4I 0.
Let C 4 so I 11. From first row, -0.3R
0.1C 0.1I 0 so R 1.5 / 0.3 5.
But, R, C and I are percentages, RCI should
100 not 20. But any scalar multiple of an
eigenvector is also an eigenvector. Thus, the
correct eigenvector is found by multiplying by
100/20
9
Application State Space Equations
Newtons second law for system gives
So system defined by
and
This is in form s y A y eigenvalue eqn
except s not ?.
Hence we can find y using eigenvalue techniques.
10
Solving State Space Equations
If we can find the eigenvalues and eigenvectors,
then we can find equations describing the
behaviour of y, ie both x and v. For this system
there are 2 eigenvalues and 2 eigenvectors. Suppos
e l1 and l2 are the eigenvalues, and L1 and L2
are the associated eigenvectors. Then the general
solution is y c1L1e?1t c2L2el2t c1 and
c2 are constants, value dependent on initial
conditions Knowing initial conditions, we can
find the particular solution. The above applies
when the eigenvalues are distinct (whether real
or complex) repeated eigenvalues are a special
case. First we will consider the system with two
distinct real roots.
11
Suppose k 3Nm-1, F 4Nsm-1 and m 1kg.
?1 - 3 ?2 - 1.
A - lIy0 , when l - 3, is
i.e. 3x v 0. Let x 1, then v -3. Thus
A - lIy0 , when l - 1, is
i.e. x v 0 Let x 1, then v -1. Thus
This is the General Solution
12
This means x c1e-3t c2e-t and v
-3c1e-3t - c2e-t
Particular Solution can be found if initial
conditions known. Suppose at t 0 that x 2m
and v 0 m/s, then equation becomes
The determinant of the square matrix is
By Cramers theorem