
Virtual Computing Environment for Future Combat Systems - PowerPoint PPT Presentation
Title:
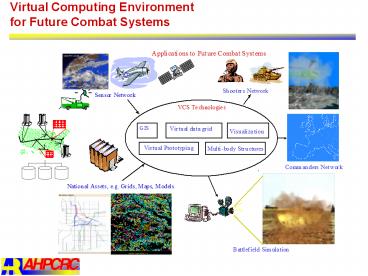
Virtual Computing Environment for Future Combat Systems
Description:
Example Usage of Geographic Info. Systems ... Examples. Chem-Bio portfolio project (Dr. Alibadi) Scenario managing a ... comparable on hand tested examples ... – PowerPoint PPT presentation
Number of Views:89
Avg rating:3.0/5.0
Title: Virtual Computing Environment for Future Combat Systems
1
Virtual Computing Environment for Future Combat
Systems
2
Maps are as important to soldiers as guns
Shooters Network
Sensor Network
HPGIS
Commanders Network e.g. Situation Assessment
National Assets, e.g. Maps
- Example Usage of Geographic Info. Systems (GIS)
in Battlefield - Rescue of pilots after their planes went down
(recently in Kosovo) - Precision targeting e.g. avoid civilian
casualities (e.g. friendly embassies) - Logistics of Troop movements, avoid friendly fires
3
Motivating Example Urban Warfare
Black Hawk Down
- Mogadishu, Somalia, 10/3/1993
- Soldiers trapped by roadblocks
- No alternate evacuation routes
- Rescue team got lost in alleys having no
planned route to crash site - 18 Army Rangers and elite Delta Force soldiers
killed, 73 wounded.
( Mark Bowden, Black Hawk Down A Story of Modern
War )
4
Motivating Example Chem-Bio Portfolio
- Examples
- Chem-Bio portfolio project (Dr. Alibadi)
- Scenario managing a (say chem-bio) attack
- Components of the system
- Gathering initial conditions
- Weather data from NWS or JSU
- Terrain maps (State of federal Govt.)
- Building geometry (City Govt.)
- Plume simulation using supercomputers
- Visualizing results map, 3D graphics
- Response planning
- Q? What happens after plume simulation,
visualization?
Weather, Terrain, Base map
Plume Modeling
Demographics, Transportation
( Images from www.fortune.com )
5
Homeland Defense Chem-Bio Portfolio
"We packed up Morgan City residents to evacuate
in the a.m. on the day that Andrew hit coastal
Louisiana, but in early afternoon the majority
came back home. The traffic was so bad that they
couldn't get through Lafayette." - Morgan
City, Louisiana Mayor Tim Mott
( http//i49south.com/hurricane.htm )
( National Weather Services)
- Hurrican Andrew, 1992
- Traffic congestions on all highways
- Great confusions and chaos
( www.washingtonpost.com)
6
Problem Statement
- Given
- Transportation network (e.g. building floor map,
city roadmap) with capacity constraints - Initial number of people to be evacuated and
their initial location - Evacuation destinations
- Output
- Scheduling of people to be evacuated and the
routes to be taken - Objective
- Minimize total time needed for evacuation
- Minimize computational overhead
- Constraints
- Capacity constraints evacuation plan meets
capacity of the network
7
Route Algorithm - Related Works
- Dynamic network flow (Ford and Fulkerson, 1960s)
- Quickest Flow Problem Only apply to single
source and single destination node - Simple algorithms for multiple source and
destination (1970s-1980s) - Algorithms have exponential running time, e.g.
EVACNET(University of Florida) - Improved algorithms (1990s)
- Klinz
- Polynomial time algorithm
- Can only find required time, not the evacuation
plan - Tardos(1994)
- Polynomial time algorithm to find optimal plan
for fixed number of sources - Cannot apply to variable number of sources
- Cannot apply to variable arc capacity, e.g. arc
capacity changed over time - May produce fractional solution, e.g. 5.2 people
go to , - feasible evacuation plan requires integer
solution
8
Route Algorithm - Our Approach
- Algorithm Design
- Extend shortest path algorithms (e.g. A) To
honor capacity contraints - Attach a time-series with each node and edge
- Edge capacity
- Node occupancy
- Start single-source routing between all (source,
dst) pairs - First route found is used to reduce edge and node
attributes - Process repeats till node capacities are reduced
to zero - Evaluation
- Much faster than the current approaches
- Solution quality is comparable on hand tested
examples - Problems with little interference across routes,
arge edge capacities - Detailed evaluation in progress
9
Example Map
Node
N1, 50 (10)
Node ID, Max Capacity (Initial Occupancy)
(7,1)
N3, 30
N5, 6
N4, 8
(3,3)
(3,3)
Edge
(Max Capacity, Travel time)
(7,1)
(3,4)
(5,4)
Exit
N2, 50 (5)
N6, 10
N7, 8
Node ID
Second Floor
N9, 25
First Floor
(2,5)
(5,5)
(6,4)
(14,4)
(6,4)
EXIT 1
N11, 8
(8,1)
(3,3)
N10, 30
(6,3)
N8, 65 (15)
N13
(3,1)
(6,4)
N12, 18
(3,3)
N14
EXIT 2
10
Result Routes, Schedules
11
Result Checking edge capacity constraints
Number of people move though each edge starting
from each time interval
12
Routing Next Phase (S. Shekhar)
- AHPCRC Relevance Projectile Target Interaction
Portfolio - Increase lethality of weapons such as guided
missiles - Pre-lauch routing stealth route avoiding enemy
sensor network - In-route routing
- to correct drifts from planned trajectory
- To route route unanticipated obstacles
- Possible Extensions in 2002-2003
- Focus on relevance to AHPCRC Portfolios
- Complete design and implementation of routing
algorithm with capacity constraints - Performance evaluation with real datasets
13
SPIRAL NATURE OF THE PRECISION ENGAGEMENT PROCESS
Locate
- Iterative process driven by effort to refine data
about target ID, location, and status - Process timeline compresses for TSTs
- Process necessarily balances timeliness,
lethality, and accuracy
Assess ISR
Locate
Defer
ID
Locate
Assess TST
ID
ID
Locate
Assess Attack
ID
Decide Attack
Assess Re-attack
Decide Employ wpns
Detect
Decide Guidance and Objectives
Target
Decide TST Status
Detect
Detect
Detect
14
Location Prediction and Spatial Data Mining (S.
Shekhar)
- Specific Project in 2001-2002
- Evaluation of location prediction techniques
- Towards high performance parallel implementation
- AHPCRC Relevance Projectile Target Interaction
Portfolio - Increase lethality of weapons such as guided
missiles - Location prediction for map matching
- to check correctness of missile trajectory
- To identify unanticipated obstacle
- Towards possible rerouting
- Army Relevance in general
- Predicting global hot spots (FORMID)
- Army land management endangered species vs.
training and war games - Search for local trends in massive simulation
data - Critical infra-structure defense (threat
assessment) - Inferring enemy tactics (e.g. flank attack) from
blobology - Locating enemy (e.g. sniper in a haystack, sensor
networks) - Locating friends to avoid friendly fire
15
Accomplishments
- Formal Results
- SAR - parametric statistics, provides confidence
measures in model - MRF from non-parametric statistics
- SAR MRF-BC linear regression Bayesian
Classifier - Rewrite SAR as y (QX) ? Q?, where Q (I-
?W)-1 - SAR has linear class boundaries in transformed
space (QX, y) - MRF-BC can represent non-linear class boundaries
- Experimental results
- MRF-BC can provide better classification
accuracies than SAR - But solution procedure is very slow
- Details in Recent paper in IEEE Transactions on
Multimedia
16
Location Prediction
- Problem Definition
- Given 1. Spatial Framework
- 2. Explanatory functions
- 3. A dependent function
- 4. A family of function mappings
- Find A function
- Objective maximize classification accuracy
- Constraints Spatial Autocorrelation in
dependent function - Past Approaches
- Non-spatial logistic regression, decision
trees, Bayesian - Assume independent distribution for learning
samples - Auto-correlation gt poor prediction performance
- Spatial Spatial auto-regression (SAR), Markov
random field Bayesian classifier (MRF) - No literature comparing the two!
- Learning algorithms for SAR are slow (took 3
hours for 5000 data points)!
17
Accomplishments
- Formal Results
- SAR - parametric statistics, provides confidence
measures in model - MRF from non-parametric statistics
- SAR MRF-BC linear regression Bayesian
Classifier - Rewrite SAR as y (QX) ? Q?, where Q (I-
?W)-1 - SAR has linear class boundaries in transformed
space (QX, y) - MRF-BC can represent non-linear class boundaries
- Experimental results
- MRF-BC can provide better classification
accuracies than SAR - But solution procedure is very slow
- Details in Recent paper in IEEE Transactions on
Multimedia
18
Past Accomplishments
- Scaleable parallel methods for GIS Querying for
Battlefield Visualization - A spatial data model for directions for querying
battlefield information - Spatial data mining Predicting Locations Using
Maps Similarity (PLUMS) - An efficient indexing method, CCAM, for spatial
graphs, e.g. Road Maps
19
GIS Research at AHPCRC
- High Performance Geographic Information Systems
(HPGIS) - Parallel formulations for terrain visualization
- Efficient storage (e.g. CCAM), join-index
- More expressive GIS - Query languages, Data
models - Mobile objects, Direction and Orientation
- Processing direction based queries
- Smarter GIS - Spatial Data Mining
- Spatial prediction, classification
- Association among spatial features
- Spatial outlier detection
Recommended
CrystalGraphics Presentations





























