
System interruption
1 / 1
Title: System interruption
1
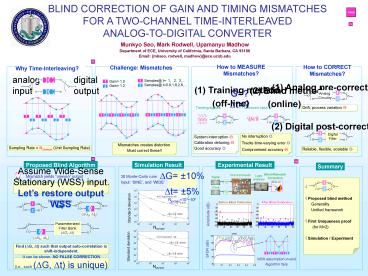
BLIND CORRECTION OF GAIN AND TIMING
MISMATCHESFOR A TWO-CHANNEL TIME-INTERLEAVED
ANALOG-TO-DIGITAL CONVERTER
1 inch
1cm
Munkyo Seo, Mark Rodwell, Upamanyu
MadhowDepartment of ECE, University of
California, Santa Barbara, CA 93106Email
mkseo, rodwell, madhow_at_ece.ucsb.edu
1cm
How to MEASURE Mismatches?
How to CORRECT Mismatches?
Challenge Mismatches
Why Time-Interleaving?
analog input
digital output
(1) Analog pre-correction
(1) Training method (off-line)
(2) Blind method (online)
G? ?t?
Drift, process variation ?
Training signals
?? Unknown input ??
(2) Digital post-correction
No interruption ? Tracks time-varying error ?
Compromised accuracy ?
System interruption ? Calibration detuning ?
Good accuracy ?
Mismatches creates distortion. Must correct
these!!
Sampling Rate Nchannel (Unit Sampling Rate)
Reliable, flexible, scalable ?
1cm
1cm
Proposed Blind Algorithm
Experimental Result
Simulation Result
Summary
?G 10 ?t 5 Nsample102106
Mismatch yields uneven output
30 Monte-Carlo runs Input SINE, and WIDE
v v Proposed blind method Generality
Unified framework v First Uniqueness
proof (for M2) v Simulation /
Experiment
Assume Wide-Sense Stationary (WSS) input. Lets
restore output WSS
Normalization
After Blind Calibration
Before Blind Calibration
Amplitude (dB)
(?G0, ?t0)
(?G0, ?t0)
Find (?G, ?t) such that output auto-correlation
is shift-independent.
SFDR (dB)
WSS assumption invalid Algorithm fails
It can be shown, NO FALSE CORRECTION (i.e., such
(?G, ?t) is unique)
Recommended
CrystalGraphics Presentations





























