
Nachos architecture - PowerPoint PPT Presentation
1 / 54
Title:
Nachos architecture
Description:
All threads within a process share the same ... decodes and executes it. This fetch-decode-execute cycle is repeated until either an illegal operation is ... – PowerPoint PPT presentation
Number of Views:70
Avg rating:3.0/5.0
Title: Nachos architecture
1
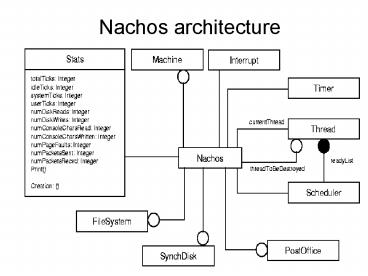
Nachos architecture
2
Threads What are they?
- A traditional process has a single thread of
control and a single program counter. - All threads within a process share the same
address space - Each, however, has its own
- program counter,
- stack for procedure calls of the kernel code
- and register set for context switch between
threads - threads can be in different states - running,
ready or blocked - All kernel threads share the kernel code
3
Creating a thread
- Thread t
- char id2, name "t"
- int i, NumThreads 4
- for(i0iltNumThreadsi)
- sprintf(id,i)
- strcat(name,id)
- t new Thread(name)
- creates 4 threads using the constructor function
for the class Thread - The constructor function simply allocates space
for thread and sets its status to JUST_CREATED - in Nachos, a "main" thread is created as part of
system initialization - the ready list remains empty upon creation of
these threads. - the global variable currentThread always points
to the thread currently occupying the CPU
4
Forking a thread
- Thread t
- char id2, name "t"
- int i, NumThreads 4
- for(i0iltNumThreadsi)
- sprintf(id,i)
- strcat(name,id)
- t new Thread(name)
- t-gtFork("somefunction",0)
- Fork() allocates a stack for the thread which
invokes it, and adds it to the ready list
maintained by the scheduler - StackAllocate() allocates and initializes the
execution stack for the thread. - A C routine ThreadRoot() is called which calls
the function "somefunction" and upon its return,
calls ThreadFinish(). - now, we have all four threads in the ready list
with their status set to READY. currentThread
still points to "main".
5
Thread Switching
- CPU switching between threads t0 and t1
- After the switch, t0 is back in the ready list
and t1 occupies the CPU. - The switch takes place when the routine Run() is
invoked. This routine is part of the Scheduler
class (see scheduler.cc in the threads
directory). Upon invocation, the routine saves
the state of the thread currently occupying the
CPU and loads the state of the thread being
switched to, into the machine registers. - The actual switch takes place by calling the
machine dependent context switch routine, SWITCH,
defined in switch.s in the threads directory. - An important point to note in the Run() routine
is what happens after the SWITCH routine returns.
All the statements in the Run() routine after the
call to SWITCH are executed by the new thread we
just switched to! Thus, the thread that invoked
the Run() routine is not the same as the one that
finishes its execution.
6
Thread Yield
- Yield() is invoked by a thread when it wants to
relinquish the CPU, leaving it up to the
scheduler to decide which thread to run next. - Assume the CPU is occupied by thread t1 and the
following code is executed - currentThread-gtYield()
- If the ready list is not empty, the Yield()
routine appends this thread to the ready list and
assigns the CPU to the thread at the head of the
ready list. If there is no other thread on the
ready queue, the routine returns without changing
the system. - Thus, if the ready list is non-empty, a switch
occurs as a result of a thread invoking Yield().
As a result of t1 invoking Yield() , t2 occupies
the CPU and t1 returns to the ready list.
7
Threadtest.cc
- //Loop 5 times, yielding the CPU to another ready
thread each iteration - Void SimpleThread(int which)
- int num
- for (num 0 num lt 5 num)
- printf(" thread d looped d times\n", (int)
which, num) - currentThread-gtYield()
- // Set up a ping-pong between two threads, by
forking a thread - // to call SimpleThread, and then calling
SimpleThread ourselves. - voidThreadTest()
- DEBUG('t', "Entering SimpleTest")
- Thread t new Thread("forked thread")
- t-gtFork(SimpleThread, 1)
- SimpleThread(0)
8
Threadtest results
- thread 0 looped 0 times
- thread 1 looped 0 times
- thread 0 looped 1 times
- thread 1 looped 1 times
- thread 0 looped 2 times
- thread 1 looped 2 times
- thread 0 looped 3 times
- thread 1 looped 3 times
- thread 0 looped 4 times
- thread 1 looped 4 times
- No threads ready or runnable, and no pending
interrupts. - Assuming the program completed.
- Machine halting!
9
Thread Finish
- Finish() is called when a thread is done
executing its forked procedure. The thread ceases
to exist and the thread at the head of the ready
list is assigned the CPU. - The global variable threadToBeDestroyed always
points to the thread that is to be deallocated.
Its default value is NULL and is set by a thread
that invokes Finish(). - Assume the CPU is occupied by thread t2 and the
following code is executed - currentThread-gtFinish()
- As a first step, the thread that invokes
Finish(), sets the variable threadToBeDestroyed
to itself and then invokes Sleep .
10
Thread Sleep
- sets the status of the invoking thread to BLOCKED
and invokes Run() to switch to the thread at the
front of the ready list. - The thread is actually deallocated inside the
Run() routine since it can only be deallocated
after it has given up the CPU. - Sleep() can be invoked by either a thread that
wants to finish or when it is blocked waiting on
a synchronization variable. - In the first case, the finishing thread sets
threadToBeDestroyed causing it to be deallocated
by the thread being switched to inside the Run()
routine. - In the second case, the blocked thread will
eventually be woken up by some other thread and
put back on the ready list.
11
Synchronization
- where two or more processes are reading or
writing some shared data and the final result
depends on who runs precisely when, are called
race conditions. - The key to avoiding race conditions is to provide
mutual exclusion - some way of making sure that
if one process is accessing a shared variable,
other processes will be excluded from doing the
same thing. - The part of the program where shared variables
are accessed is called the critical region or
critical section. - If execution of processes is arranged in a manner
such that no two processes were in their critical
section at the same time, race conditions are
avoided
12
Semaphores
- built on the hardware solutions
- A semaphore S is an integer variable that can be
accessed only through two atomic operations - P
and V (Dutch for wait and signal respectively).
These are defined as follows - P(S) while S lt 0 do no-op S S-1
- V(S) S S 1
- The testing and modification of the value of the
semaphore in both the operations must be done
atomically
13
synchronize two processes
- The condition is that B S2 can be executed only
after A S1. - This can be achieved by having a semaphore, synch
initialized to 0. - A and B will now execute the following code
- A S1 V(synch)
- B P(synch) S2
- Because synch is initialized to 0, B will execute
S2 only after A has signalled it by invoking
V(synch) which is after S1
14
semaphore in Nachos
- in the files synch.cc and synch.h in the threads
directory - P() and V() are made atomic by interrupts
disabled - Each semaphore has a queue associated with it -
the list class - To grab a semaphore, P() operation.
- If the semaphore is not available, the process
goes to sleep by invoking the Sleep operation on
itself - Upon a signal, it decrements the value of the
semaphore and executes its critical section. - Before a process exits its critical section, it
invokes V(). - As part of this operation, a process waiting in
the semaphore queue is removed and scheduled to
start executing. - This is done by placing it in the Ready List
maintained by the scheduler. The process is
appended to this list for later assignment to the
CPU (ReadyToRun() in scheduler.cc. ).
15
Locks
- a synchronization primitive similar to
semaphores, for providing mutual exclusion - A lock can either be free or busy initially, a
lock is free - two atomic operations provided are Acquire and
Release - Before accessing a shared variable, a process
acquires the lock, and releases it after it is
done accessing that variable - two processes A and B accessing a shared variable
would execute the following code to synchronize
their access to their critical sections - Lock-gtAcquire()
- critical section
- Lock-gtRelease()
16
Locks in Nachos
- Implementation of locks and condition variables
(see section below) is part of a lab. - A skeleton definition of a Lock class is provided
in synch.h, - There are three issues to consider here
- Atomicity of Acquire() and Release().
- disabling interrupts
- Provision of some wait mechanism if a process
trying to acquire the lock cannot do so. - implement a queue for each lock
- Making sure that only the process that acquires
the lock will release the lock. - Use the function isHeldByCurrentThread()
17
Monitors
- A monitor is a high level primitive, provided as
a programming language construct. - a collection of procedures, variables, and data
structures grouped together in a special module
or package - monitor synch
- integer i condition c
- procedure producer(x) . . end
- procedure consumer(x) . . end
- end monitor
- A process may call the procedures within a
monitor but cannot directly access the monitor's
internal data structures - only one process can be active in a monitor at
any instant
18
Condition Variables
- Monitors need to provide a way for the processes
to block themselves when they cannot proceed, use
Condition variables - two operations are provided - wait and signal
- When a monitor procedure finds that it cannot
continue, it does a wait on some condition
variable - This causes the calling process A to block. It
also allows another process, B, that had
previously been prohibited from entering the
monitor to enter now. B can now wake up another
process by doing a signal on the condition
variable that A was waiting on - To avoid having two processes active inside the
monitor at the same time, we need a rule
specifying what happens after a signal. - Should B wait till A leaves the monitor or should
A wait until B leaves the monitor. Two schemes
have been proposed - the Hoare style and the Mesa
style. - In the former, the signalling process gives up
control over the monitor and the CPU to the woken
process which starts running immediately and
gives back control of the monitor to the
signaller when it leaves its critical section. In
the Mesa style, the woken thread is simply put on
the ready list and it becomes the responsibility
of the woken thread to re-enter the monitor.
19
Implement condition variables
- part of synch.h it is your job to implement it
- All operations on a condition variable in Nachos
must be made while the current process/thread has
acquired a lock (see parameters to the functions
Wait(), Signal() and Broadcast()). - All accesses to a given condition variable must
be protected by the same lock. This means that
your implementation must enforce mutual exclusion
among processes invoking the operations on
condition variables. - Wait(), Signal() and Broadcast() have the
following semantics - Wait() releases the lock, gives up the CPU until
signalled and then re-acquire the lock. - Signal() wakes up a thread if there are any
waiting on the condition variable. - Broadcast() wakes up all threads waiting on the
condition. - In Nachos, condition variables obey the Mesa
semantics. When a Signal() or Broadcast() wakes
up another thread/process, it simply puts the
thread on the ready list, and it is the
responsibility of the woken thread to re-acquire
the lock. Note that this re-acquire should be
taken care of within your implementation of
Wait(). - Your implementation for condition variables must
include a queue for processes waiting on the
condition variable - in your implementation for Wait(), the calling
process should release the lock, append itself to
the queue and sleep until it is woken up by
another thread. Upon waking up, it should
re-acquire the lock. - For Signal(), the calling process should remove a
thread from the condition queue and place it on
the scheduler's ready list. - The Broadcast() operation must do the same but
for all the threads on the condition queue
20
Interrupt management
- Types of interrupt
- the completion of an I/O operation,
- Associated with each I/O device class, e.g.,
floppy disks, hard disks, timers, console, is a
location at the bottom of memory called the
interrupt vector. - This contains the addresses of the interrupt
service routines for various devices. - When an interrupt occurs, the interrupt hardware
pushes the program counter, program status word,
and possibly one or more registers onto the
current stack - an error in a user program such as division by
zero, - an invalid memory access,
- a software request for operating system service
such as a system call operation
21
Interrupt Management
- interrupt vector
- For each I/O device class, e.g., floppy disks,
hard disks, timers, console, is a location at the
bottom of memory called the interrupt vector. - contains the addresses of the interrupt service
routines for various devices. - When an interrupt occurs, the interrupt hardware
pushes the program counter, program status word,
and possibly one or more registers onto the
current stack. - The computer then jumps to the address specified
in the appropriate entry in the interrupt vector
and starts execution from there. - to determine which entry in the interrupt vector
to use, a unique device number provided with the
interrupt request is used to index into the
vector. - The interrupt service routine
- The interrupt service routine starts out by
saving all the registers in the process table
entry for the current process. - The instructions in the service routine are then
executed. - Upon completion, registers and other data
structures for the current process are re-loaded
and the process starts running again. - Usually, interrupts are disabled while an
interrupt is being serviced, delaying any other
incoming interrupts. Thus, it is important that
interrupt service routines be short
22
Nachos Interrupt
- interrupt management are in interrupt.h and
interrupt.cc in the machine directory. - The class PendingInterrupt defines an interrupt
that is scheduled to occur in the future. - The main routines are
- Schedule() schedules a future event to take place
at a time specified in the one of the parameters
to this routine. This is done by creating a
PendingInterrupt object and placing it in the
event queue. When it is time for the scheduled
interrupt to take place, Nachos calls the handler
routine. - SetLevel() changes the interrupt mask from its
current status to an argument specified as a
parameter to this routine. This routine is used
to temporarily disable and re-enable interrupts
for the purposes of mutual exclusion. Only two
interrupt levels are supported IntOn and IntOff.
- OneTick() advances the clock one tick and
services any pending interrupts by calling the
routine CheckIfDue(). This routine is called from
the Run() routine which is part of the Machine
class, after each user-level instruction is
executed, and also by SetLevel() when the
interrupts are restored. - CheckIfDue() examines the event queue for events
that need servicing now. If it finds any, it
services them by calling the appropriate handler
routine. - Idle() "advances" the clock to the time of the
next scheduled event. It is called by the
scheduler when there is nothing in the ready
queue. - The Timer class defined in timer.h(cc) in the
machine directory simulates a real-time clock in
Nachos by generating interrupts at regular
intervals. The constructor creates a real-time
clock that interrupts the CPU every TimerTicks
units. This constant is defined in stats.h to be
100
23
Nachos simulates interrupts
- by maintaining an event queue together with a
simulated clock. - As the clock ticks, the event queue is examined
to find events scheduled to take place at that
time. - The clock is maintained entirely in software and
advances under the following conditions - Every time interrupts are restored (and the
restored interrupt mask has interrupts enabled).
Nachos code frequently disables and enables
interrupts for the purposes of mutual exclusion
by explicitly calling the routine SetLevel(). - Whenever the MIPS simulator executes one
instruction, the clock advances one tick. - Whenever the ready list is empty, the clock
advances however many ticks are needed to
fast-forward the current time to that of the next
scheduled event. - Whenever the clock advances, the event queue is
examined and any pending interrupts are serviced
by invoking the interrupt service routine. - All interrupt service routines are run with
interrupts disabled, - the service routine may not re-enable them.
24
User process
- A process running a user program in its own
address space - Has its own
- user stack
- User register state
- Runs its own code in user mode
- Invokes system calls to run kernel code in system
mode - User process kernel thread address space
user register set
25
Nachos user process
- Class Thread
- private
- int stackTop
- int machineStateMachineStateSize
- public
- .
- int userRegistersNumTotalRegs
- public
- void SaveUserState()
- void RestoreUserState()
- AddrSpace space
26
System Calls
- System calls are an interface between the
operating system and its application programs - consider the open system call in UNIX
- open(char path, int flags, int mode)
- A system call is treated as a software interrupt
by the hardware. - Control passes through an interrupt vector to a
service routine in the operating system. - The kernel examines the interrupting instruction
to determine the type of system call, verifies
the correctness of the parameters and executes
the request, returning control to the instruction
following the system call. - The parameters to the system call may be passed
in registers, on the stack, or in memory with
pointers to memory locations passed in registers.
27
Exceptions
- Exceptions
- caused by the occurrence of unusual conditions
during a process' execution - often are the result of programming errors, such
as division by zero or integer overflow. - exception causes a trap to the operating system
- transfers control through the interrupt vector to
the operating system. - servicing of an exception works just like an
interrupt. - operating system may abnormally terminate the
program - an error message is displayed
- a memory dump of the program is saved in a core
file - user can then examine this memory dump and fix
the problem
28
Nachos System calls/Exception Handling
- List of Nachos system calls and UNIX equivalent
29
Syscall code
- User programs invoke system calls by executing
the MIPS syscall instruction, - generates a trap into the Nachos kernel.
- The MIPS simulator implements traps by invoking
the routine RaiseException() (see exception.cc)
to take care of the problem. - ExceptionHandler() is passed an argument
indicating the kind of exception that has been
raised - A list of exceptions that can be raised within
Nachos is in machine.h. - The list of system calls in Nachos is in
syscall.h. - The actual instructions for making system calls
are found in start.s . - At runtime, a code indicating the type of system
call is placed in register 2 and the syscall
instruction is executed. - Additional arguments to the system call are
placed in registers 4-7, following standard C
procedure call linkage conventions. - Any return values are expected to be in register
2. - The syscall instruction is a trap instruction,
meaning the next instruction to be executed is
the first instruction is the trap handler. - In Nachos, the trap handler is the routine
ExceptionHandler()
30
Syscall sequence
- 1 include "syscall.h"
- 2 .text
- 3 .align 2
- 4
- 5 .globl __start
- 6 .ent __start
- 7 __start
- 8 jal main / Call the procedure "main" /
- 9 move 4,0 / R4 gets 0 /
- 10 jal Exit / If we return from main, exit(0) /
- 11 .end __start
- 12
- 13 .globl Halt
- 14 .ent Halt
- 15 Halt
- 16 addiu 2,0,SC_Halt
- 17 syscall
- 18 j 31
- 19 .end Halt
31
run user programs in Nachos
- Nachos can run arbitrary user programs as long as
they make only those system calls that are
understood by Nachos - Nachos executables are in the Noff format
- Eg to compile halt.c
- halt.o
- halt.c (CC) (CFLAGS) -c halt.c
- halt halt.o start.o
- (LD) (LDFLAGS) start.o halt.o -o halt.coff
- ../bin/coff2noff halt.coff halt
32
Noff format
- Noff format files consist of four parts.
- Noff Header. This resides at the beginning of the
file and describes the contents of the rest of
the file, giving information about the program's
instructions, initialized variables and
uninitialized variables. In the variable
noffMagic , the header maintains a reserved magic
number indicating that the file is in the Noff
format. Before attempting to execute a
user-program, Nachos checks for the existence of
this magic number to make sure the file is a
Nachos executable. - The executable code segment.
- Initialized data segment.
- Uninitialized data segment.
- For each of the last three sections of the file,
the Noff header contains information in the
following variables - virtualAddr - The virtual address that segment
begins at (usually zero). - inFileAddr - Pointer within the Noff file where
that section actually begins so that Nachos can
read it into memory before execution. - size - The size of that segment.
33
Makefile revisited
- 1 all halt shell matmult sort
- 2 start.o start.s ../userprog/syscall.h
- 3 (CPP) (CPPFLAGS) start.s gt strt.s
- 4 (AS) (ASFLAGS) -o start.o strt.s
- 5 rm strt.s
- 6 shell.o shell.c
- 7 (CC) (CFLAGS) -c shell.c
- 8 shell shell.o start.o
- 9 (LD) (LDFLAGS) start.o shell.o -o
shell.coff - 10 ../bin/coff2noff shell.coff shell
34
The Nachos MIPS CPU
- loading instructions for the user programs into
Nachos main memory - initializing registers (including the program
counter) - asking the machine to start executing those
instructions - The machine
- fetches the instruction that is pointed to by
PCReg (the register containing the program
counter), - decodes and executes it.
- This fetch-decode-execute cycle is repeated until
either an illegal operation is performed or a
hardware interrupt is generated. - In such an event, the execution of the MIPS
instructions is suspended and a Nachos interrupt
service routine is invoked to deal with the
condition
35
Machine object
- Registers
- Memory
- MMU
- Virtual Memory
- a linear page table
- or translation lookaside buffer
- Devices
- The Console Device
- The Disk Device
- Exception Handling
- The MIPS simulator
36
MIPS
- Class Machine
- public
- char mainMemory
- int registersNumTotalRegs
- TranslationEntry tlb
- TranslationEntry pageTable
- unsigned int pageTableSize
- private
37
Machine Setup
38
MIPS machine
- class Machine
- public
- void Run() // run a user program
- void OneInstruction(Instruction instr) // run
one instruction of user program - int ReadRegister(int num)
- void WriteRegister(int num, int value)
- bool ReadMem(int addr, int size, int value)
- bool WriteMem(int addr, int size, int value)
- ExceptionType Translate(int virtAddr, int
physAddr, int size) - void RaiseException(ExceptionType which, int
badVAddr) - char mainMemory
- int registersNumTotalRegs
- When a program is loaded into memory the Nachos
operating system reads the contents of the
program's executable file from disk, then writes
those contents into main memory. This is done one
byte at a time. - Once the contents of the executable are in memory
and the program counter is set, the machine
begins execution by calling MachineRun().
39
MachineRun()
- When a program is loaded into memory the Nachos
operating system reads the contents of the
program's executable file from disk, then writes
those contents into main memory. This is done one
byte at a time. Once the contents of the
executable are in memory and the program counter
is set, the machine begins execution by calling
MachineRun(). - Void MachineRun()
- Instruction instr new Instruction
- if (DebugIsEnabled(n)) printf()
- interrupt-gtsetStatus(UserMode)
- for()
- OneInstruction(instr)
- interrupt-gtOneTick()
- if(singleStep (runUntilTime lt
status-gttotalTicks)) - Debugger
40
Executing one instruction
- Class Instruction
- public
- void Decode()
- unsigned int value // binary representation of
the instruction - char opCode
- char rs,rt,rd
- int extra // immediate, etc
- Void MachineOneInstruction(Instruction instr)
- if (!machine-gtReadMem(registersPCreg,4,raw)
return - instr-gtvalueraw
- instr-gtDecode()
- switch(instr-gtopCode)
- ...
- ...
- ...
- case OP_SYSCALL RaiseException(SyscallException,
0) break - case OP_XOR registersinstr-gtrd
registersinstr-gtrs ... break - case OP_XORI registersinstr-gtrt
registersinstr-gtrs ... break
41
Exception Handling Simulation
- Change to system mode
- Call corresponding exception handler
- Void machine RaiseException(ExceptionType
which, int badVAddr) - DEBUG(..)
- registerpBadVAddrRegbadVAddr
- DelayedLoad(0,0)
- interrupt-gtsetStatus(SystemMode)
- ExceptionHandler(which)
- interrupt-gtsetStatus(UserMode)
42
trap
43
Main memory
44
Main Memory
- main memory is implemented as an array of bytes.
This array is written to by the instruction
WriteMem(), and is read by the instruction
ReadMem(). - page table, which is a table of translations from
virtual addresses to physical addresses. - An executing instruction which references a
virtual address must first have that virtual
address translated into a physical address via
Translate() (which refers to the page table)
before it can be executed.
45
Thread
- From code/threads/thread.h
- class Thread
- public
- FDTEntry FDTable MAX\_FD
- int ThreadID
- ThreadStatus status
- unsigned int stack
- char name MAXFILENAMELENGTH 1
- int userRegistersNumTotalRegs
- void SaveUserState()
- void RestoreUserState()
- AddrSpace space
- FDTEntry getFD (int fd)
- private
- unsigned int machineStateMachineStateSize
46
Context Switching
47
SchedulerRun(),
- void SchedulerRun (Thread nextThread)
- Thread oldThread currentThread
- if (currentThread-gtspace ! NULL)
- currentThread-gtSaveUserState()
- currentThread-gtspace-gtSaveState()
- currentThread nextThread
- currentThread-gtsetStatus(RUNNING)
- SWITCH(oldThread, nextThread)
- if (threadToBeDestroyed ! NULL)
- delete threadToBeDestroyed
- threadToBeDestroyed NULL
- if (currentThread-gtspace ! NULL)
- currentThread-gtRestoreUserState()
- currentThread-gtspace-gtRestoreState()
48
Running User program
49
Memory management
- Paging to give its threads contiguous logical
address spaces - logical address spaces are 128 kilobytes in size,
even though the simulated MIPS processor on which
they run has only 16 kilobytes of main memory - MemoryManager and Machine objects together serve
as the MMU of the nachos system - The MemoryManager object keeps track of which
physical memory pages are free, which are used,
and the owners of the used pages. As such, it is
primarily involved in memory resource allocation.
The Machine object, among other things, holds the
page table of the currently running Nachos
thread. - AddrSpace object. This object is simply an
abstraction of the thread's logical address
space, and contains a pointer to the thread's
page table. When the CPU is given to the thread,
the page table in the Machine object is loaded
using this pointer
50
Page table
- implemented as an array of TranslationEntry
objects, one object for each page of the thread's
logical address space. - class TranslationEntry
- public
- unsigned int virtualPage
- unsigned int physicalPage
- bool valid // page is not swapped out
- bool readOnly // program text
- bool use // set when referenced by hardware
- bool dirty // modified
- OpenFile File
- size_t offset
- bool zero
- bool cow
51
Running user program
- the thread object has a pointer to an address
space object, which has a page table inside it. - To run a user program, the thread must have
control of the MIPS simulator. When this is the
case, the thread's user program will be resident
in main memory and the machine's program counter
will be pointing to an instruction somewhere in
that memory. - Then the machine invokes Run(), which simply
loops through a fetch-and-execute cycle, reading
instructions from main memory and executing them
until the threads quantum expires and the
scheduler swaps it out.
52
Memory management
53
Paging and page fault
54
Demand paging
- When a Nachos program is loaded, only its first
and last pages are brought into main memory - The first page will be the first page of the
program's text segment, and the last page will be
its stack - Nachos handles page faults by loading the
referenced page into main memory, and restarting
the instruction that generated the page fault. - Pages are swapped in using the MemoryManagerpage
in() function. In order to swap a page in, this
function may need to swap another page out (if
there are no free pages). This is done using the
MemoryManagerpageout() function. - The file from which a page is read when being
swapped into memory will vary depending on the
nature of the page. The TranslationEntry object
of each page contains a pointer to an OpenFile
object. - OpenFile object member points
- to the file from which the page can be read if it
gets swapped out disk and has to be swapped back
into main memory. - This will point to the swap file, if the page had
been modified before it was swapped out, - or the original executable file if it has not
been modified. - If the page contained was contained only
uninitialized data, the pointer to the OpenFile
object is set to NULL
Recommended
CrystalGraphics Presentations





























