
Kristoffer Flores, Shawn Young
1 / 1
Title:
Kristoffer Flores, Shawn Young
Description:
... burst mode sine wave or 4-bit Barker code (stream of binary bits) either with ... sound in water * delay) Goals for Next Semester: Barker code output - 1011 ... –
Number of Views:60
Avg rating:3.0/5.0
Title: Kristoffer Flores, Shawn Young
1
ACTIVE SONAR TRANSMITTER
Kristoffer Flores, Shawn Young
kbf041000_at_utdallas.edu, scy041000_at_utdallas.edu
Department of Electrical Engineering Erik Jonsson
School of Engineering Computer
Science University of Texas at Dallas Richardson,
Texas 75083-0688, U.S.A.
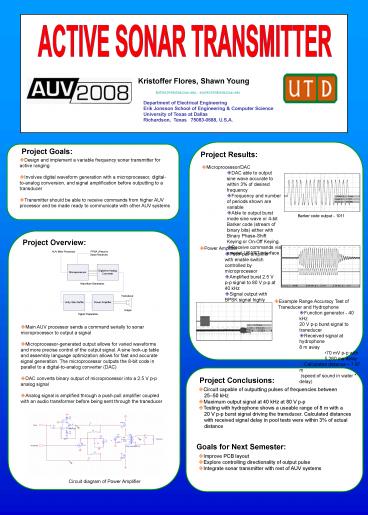
Project Goals
Project Results
- Design and implement a variable frequency sonar
transmitter for active ranging - Involves digital waveform generation with a
microprocessor, digital-to-analog conversion, and
signal amplification before outputting to a
transducer - Transmitter should be able to receive commands
from higher AUV processor and be made ready to
communicate with other AUV systems
- Microprocessor/DAC
- DAC able to output sine wave accurate to within
3 of desired frequency - Frequency and number of periods shown are
variable - Able to output burst mode sine wave or 4-bit
Barker code (stream of binary bits) either with
Binary Phase-Shift Keying or On-Off Keying. - Receive commands via a serial USART interface
Barker code output - 1011
Project Overview
- Main AUV processor sends a command serially to
sonar microprocessor to output a signal - Microprocessor-generated output allows for varied
waveforms and more precise control of the output
signal. A sine look-up table and assembly
language optimization allows for fast and
accurate signal generation. The microprocessor
outputs the 8-bit code in parallel to a
digital-to-analog converter (DAC) - DAC converts binary output of microprocessor into
a 2.5 V p-p analog signal
- Power Amplifier
- Push-pull amplifier with enable switch controlled
by microprocessor - Amplified burst 2.5 V p-p signal to 80 V p-p at
40 kHz - Signal output with BPSK signal highly distorted
- Example Range Accuracy Test of
- Transducer and Hydrophone
- Function generator - 40 kHz
- 20 V p-p burst signal to transducer
- Received signal at hydrophone
- 8 m away
- 70 mV p-p with 5.260 ms delay
- Calculated distance 7.87 m
- (speed of sound in water delay)
Project Conclusions
- Circuit capable of outputting pulses of
frequencies between - 2550 kHz
- Maximum output signal at 40 kHz at 80 V p-p
- Testing with hydrophone shows a useable range of
8 m with a - 20 V p-p burst signal driving the transducer.
Calculated distances - with received signal delay in pool tests were
within 3 of actual - distance
- Improve PCB layout
- Explore controlling directionality of output
pulse - Integrate sonar transmitter with rest of AUV
systems
Goals for Next Semester
Recommended
CrystalGraphics Presentations





























